

Oil drive quadrotor unmanned aerial vehicle attitude control method
A quadrotor UAV, attitude control technology, applied in attitude control, non-electric variable control, adaptive control and other directions, can solve the problem of inability to overcome harmful noise, affect the stability of the UAV system, and cannot effectively control the oil movement Problems such as stable flight of quadrotor UAV
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
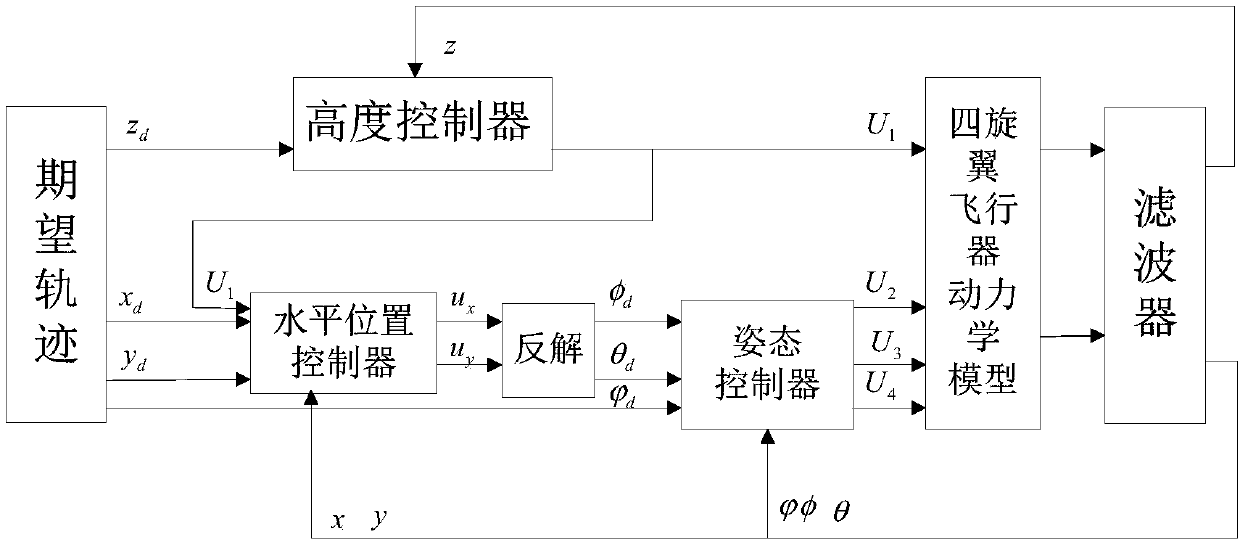
[0068] Example 1: From figure 1 It can be seen that the attitude control method of the oil-powered quadrotor UAV of the present invention combines the filter with the arithmetic average filtering to obtain the current precise height vector z, the current precise horizontal vector y, and the current precise horizontal vector x, respectively. Expected value z by height vector d , the horizontal vector expected value y d , the horizontal vector expected value x d After making the difference with the current precise height vector z, the current precise horizontal vector y, and the current precise horizontal vector x, the height control amount U is obtained through the adaptive backstep control algorithm. 1 and the horizontal position control amount u x and u y , then u x and u y Enter the attitude controller, by u x and u y Expected value φ of pitch attitude angle calculated by inverse solution d and the expected roll attitude angle θ d After making the difference with t...
Embodiment 2
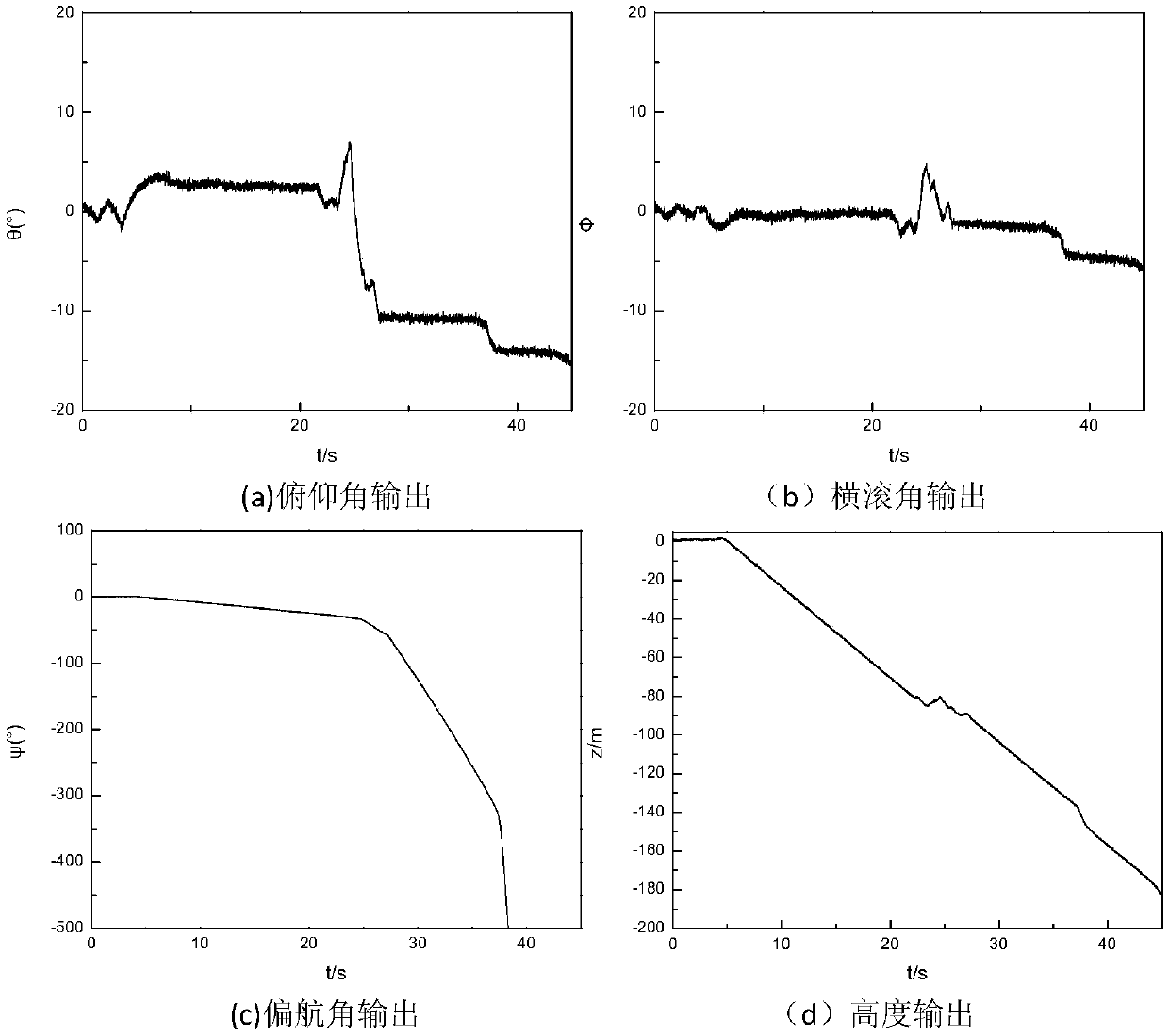
[0069] Example 2: The initial value of the pitch angle and roll angle is set to 0.5rad, the initial value of its angular velocity is 0.5rad / s, the initial value of other state quantities is zero, the expected flight height is 1m, and the expected attitude angle and angular velocity are zero. .
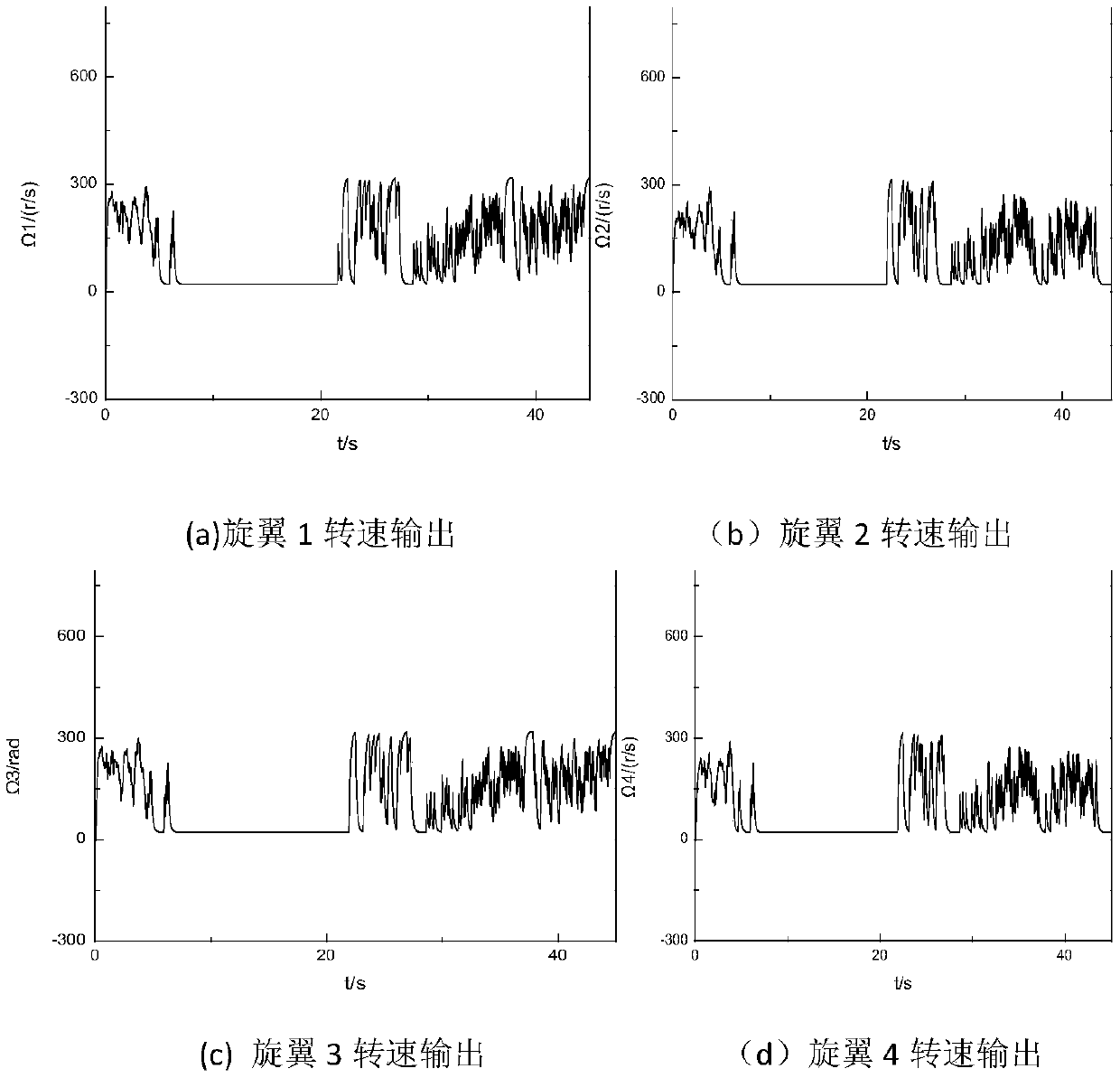
[0070] When the control method is the conventional adaptive integral backstepping method, from figure 2 , image 3 and Figure 4 It can be seen that under the set conditions, the conventional adaptive integral backstepping method in the case of the noise power of the oil-driven quadrotor, the attitude and altitude trajectory of the quadrotor are always in deviation, and the four rotational speeds of the quadrotor are in irregular rotation. status, from Figure 4 It can be seen that there is an absolute error between the attitude angle and the desired attitude angle due to the continuous vibration and noise interference, but the absolute error value of the attitude angle controlled ...
Embodiment 3
[0071] Example 3: The initial value of the pitch angle and roll angle is set to 0.5rad, the initial value of its angular velocity is 0.5rad / s, the initial value of other state quantities is zero, the expected flight height is 1m, and the expected attitude angle and angular velocity are zero. .
[0072] When the control method adopts the attitude control method of the oil-powered quadrotor unmanned aerial vehicle of the present invention, under the set conditions, from Figure 5 , Image 6 and Figure 7 It can be seen that under the same noise power of the oil-powered quadrotor as in Example 2, the attitude and height trajectory of the quadrotor are basically consistent with the expected trajectory within the allowable error range, the four rotational speeds of the rotor are basically the same, and the horizontal direction of the oil-powered quadrotor is basically the same. The roll angle, pitch angle, and yaw angle range from -0.1 to 0.1 and tend to 0, and the height range f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More