A distributed wave recording synchronization method, device and apparatus, and a medium
A distributed, wave-recording technology, applied in the field of power systems, can solve problems such as synchronization errors, affecting the safe operation of power grids that affect the speed of power supply restoration, and achieve the effects of accelerating the speed, accurately realizing the synchronization of the wave-recording curve, and reducing the amount of calculation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
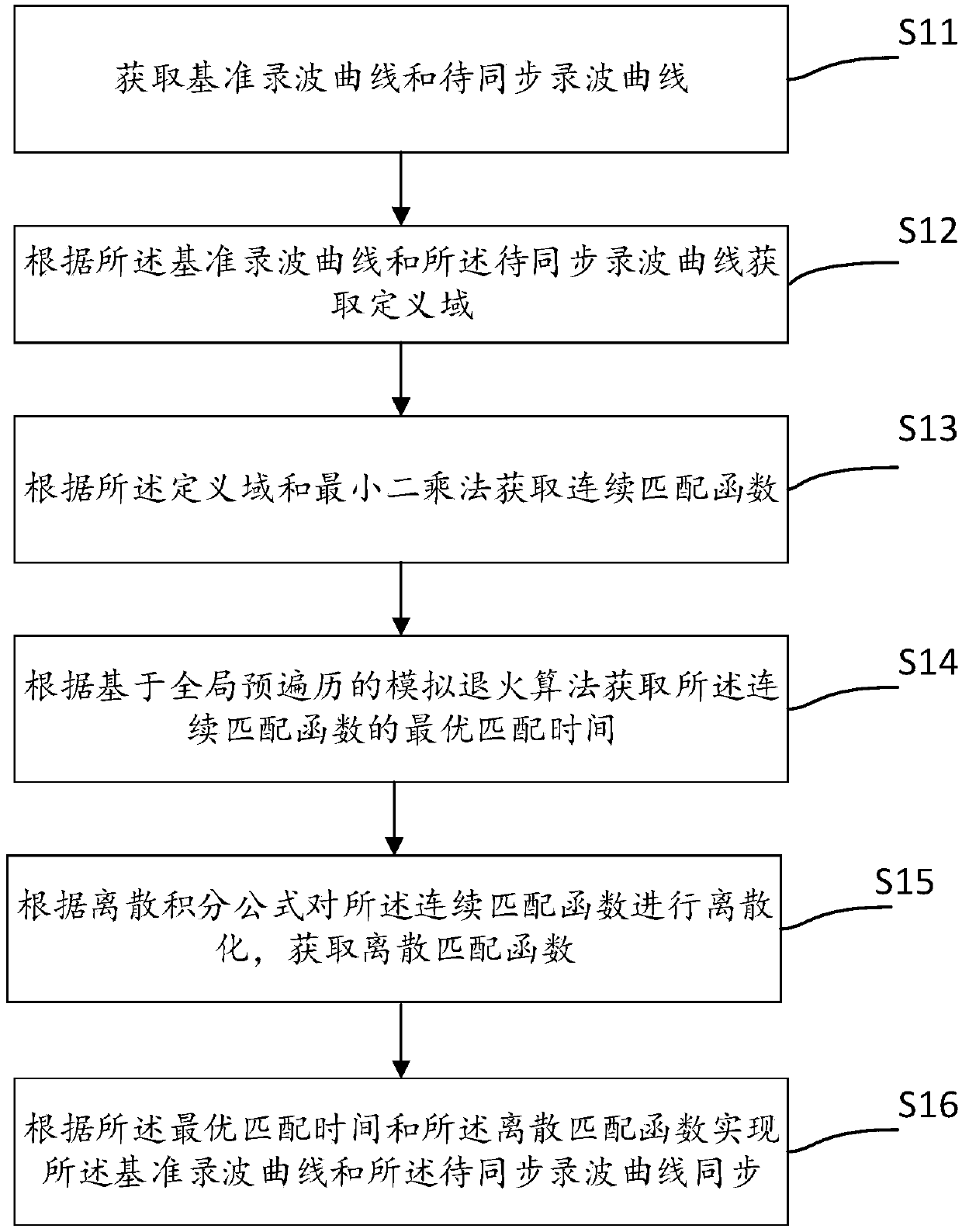
[0063] see figure 1 , a schematic flowchart of the distributed wave recording synchronization method provided by the first embodiment of the present invention;
[0064] S11. Obtain the reference wave recording curve and the wave recording curve to be synchronized;
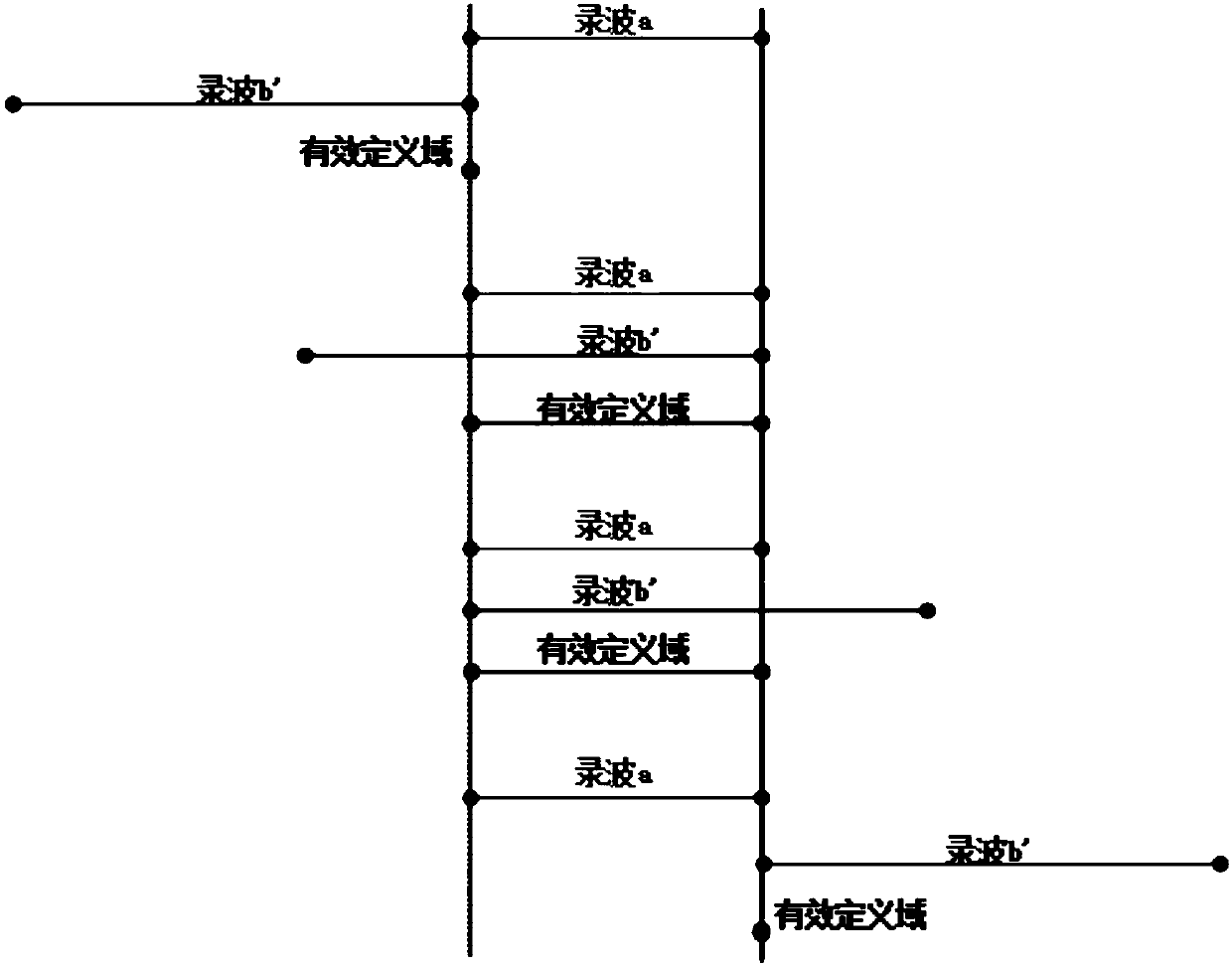
[0065] It should be noted that distributed wave recording includes multiple wave recording files from multiple control and protection devices, each control and protection device has a corresponding wave recording file, and each wave recording curve in each wave recording file has the same The start and end time and sampling rate, that is to say, the recordings in each file are synchronized, but the recording curves in different recording files do not necessarily have the same starting and ending time and sampling rate. The synchronization of wave recording files, as long as one of the wave recording files is used as the reference wave recording file, a certain wave recording curve a in the reference wave recording...
Embodiment 2
[0096] Embodiment two, on the basis of embodiment one, refer to Figure 9 It is a schematic flowchart of another distributed recording synchronization method provided by the second embodiment of the present invention;
[0097] Preferably, the obtaining the optimal matching time of the continuous matching function according to the simulated annealing algorithm based on global pre-traversal includes:
[0098] S31. Obtain the full-range low-density ergodic curve of the continuous matching function according to the ergodic method of small equal parts n;
[0099] S32. Acquire the range of the corresponding low-density ergodic curve when the value of the continuous matching function is small;
[0100] S33. Within the range, obtain the optimal matching time of the continuous matching function according to a simulated annealing algorithm with a faster decay of the temperature T.
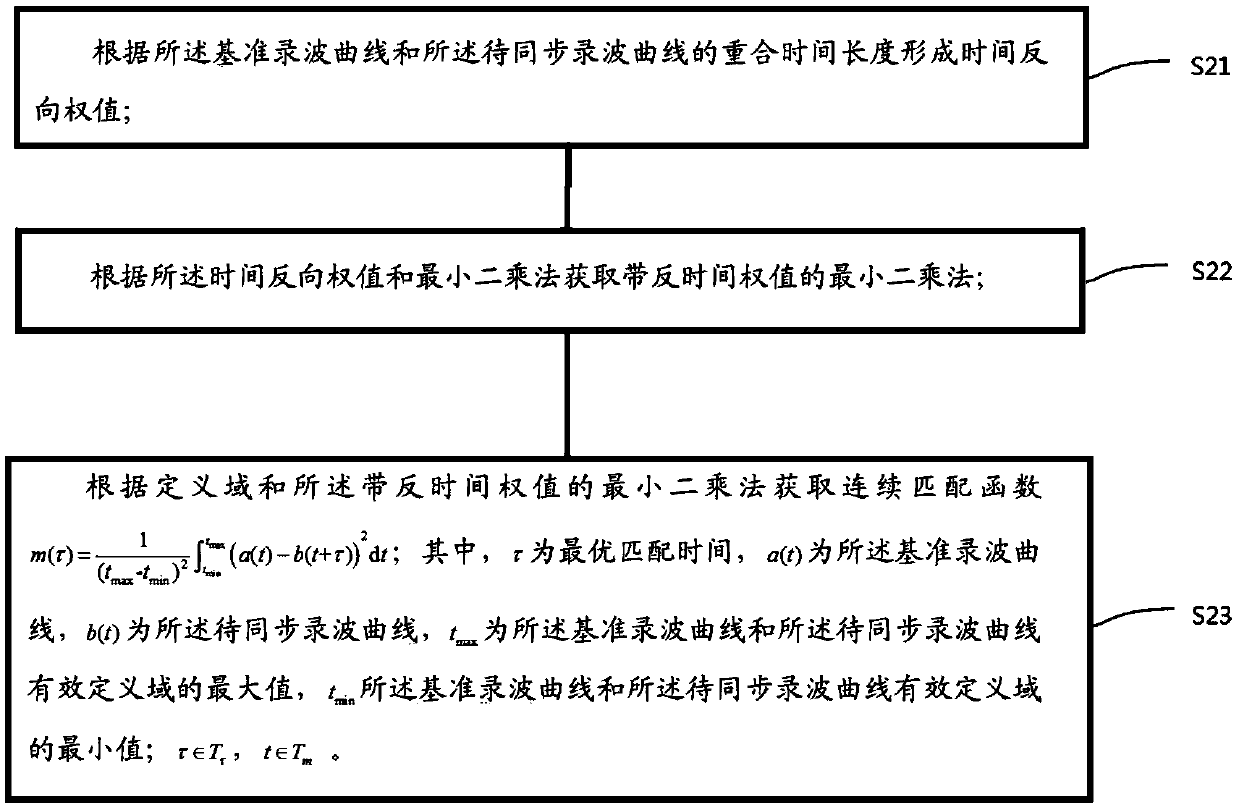
[0101] It should be noted that, in the matching function domain range T τ The τ corresponding to the m...
Embodiment 3
[0111] Embodiment three, on the basis of embodiment one, refer to Figure 10 It is a schematic flowchart of another distributed wave recording synchronization method provided by the third embodiment of the present invention;
[0112] The synchronization of the reference wave recording curve and the wave recording curve to be synchronized according to the optimal matching time and the discrete matching function includes:
[0113] S41. Obtain the original sampling points of the reference wave recording curve and the wave recording curve to be synchronized;
[0114] S42. Calculate the discrete matching function according to the original sampling points, and obtain the calculated discrete matching function;
[0115] S43. Synchronize the reference wave recording curve and the to-be-synchronized wave recording curve according to the optimal matching time and the calculated discrete matching function.
[0116] It should be noted that for the two curves to be synchronized, the recor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com