

Multi-parallel coexisting-cooperative-cognitive robot large-scale optical mirror surface machining device
A technology of optical mirror surface and processing equipment, applied in metal processing equipment, optical surface grinder, grinding/polishing equipment, etc., can solve the problems of damage to optical mirror surface, slow dynamic response speed, difficult to control, etc., to ensure optical characteristics and performance, improve the mirror processing accuracy, not easy to deform or damage the effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
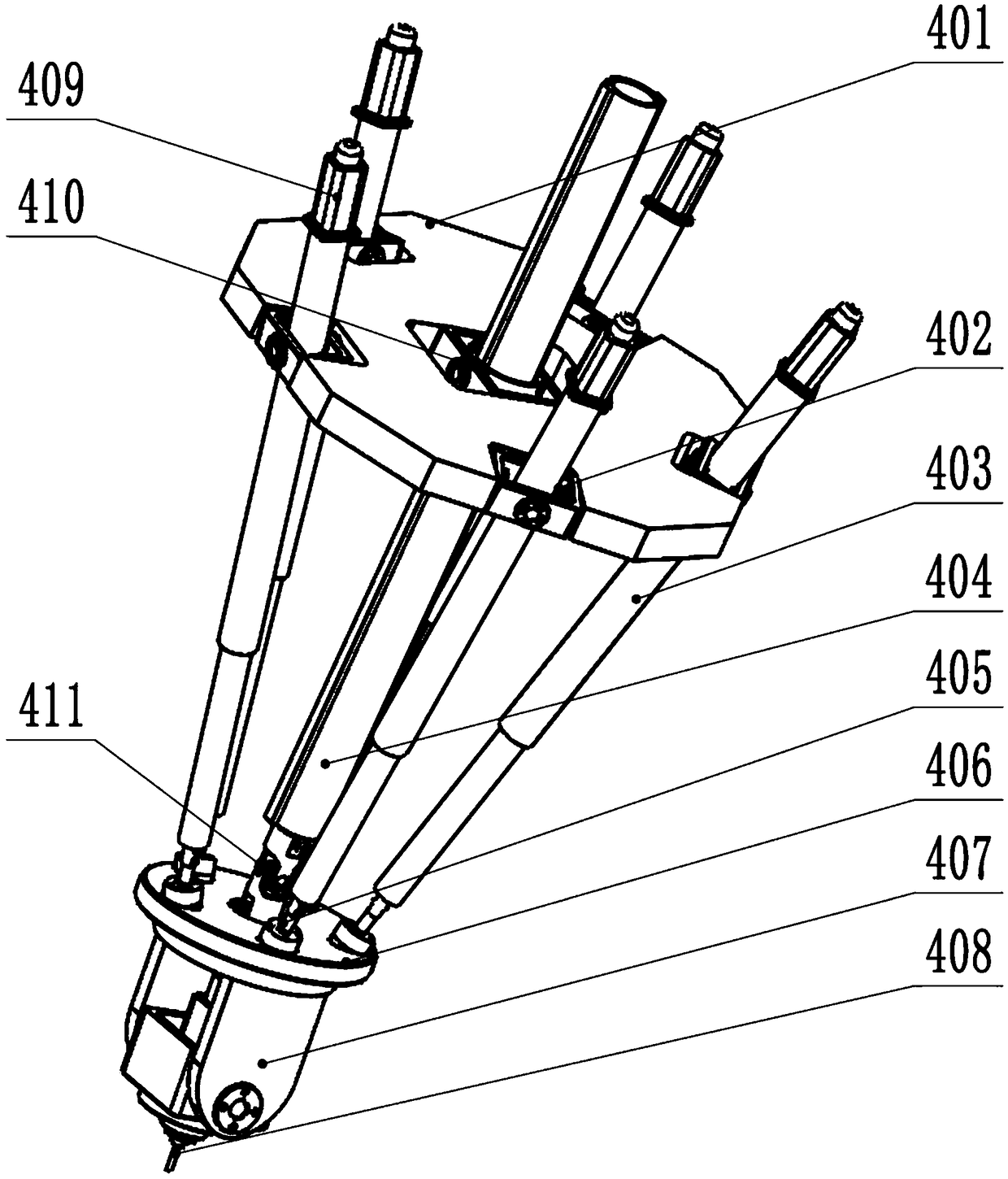
[0031] The present invention will be described in detail below in conjunction with the accompanying drawings. Among them, the moving pair P in UPS stands for active moving pair, the moving pair P of UPU stands for passive moving pair, the moving pair P in PUU stands for active moving pair; U stands for Hooke hinge, P stands for lead screw, and S stands for ball hinge.
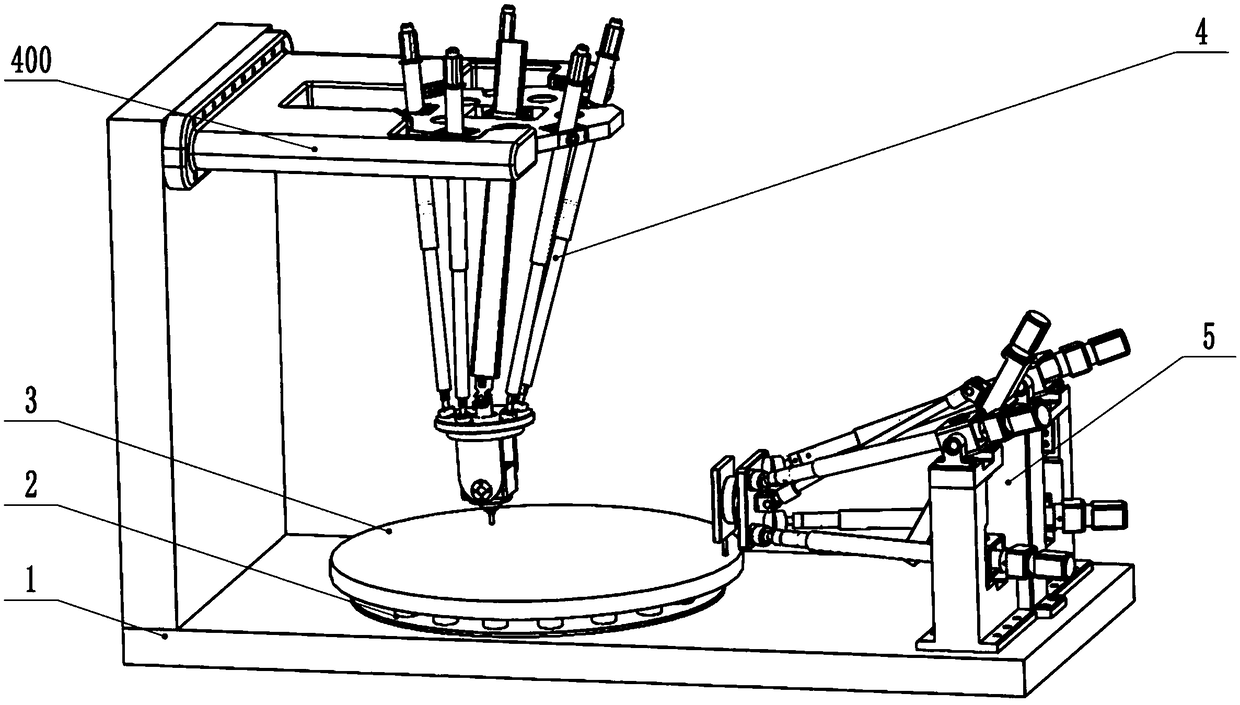
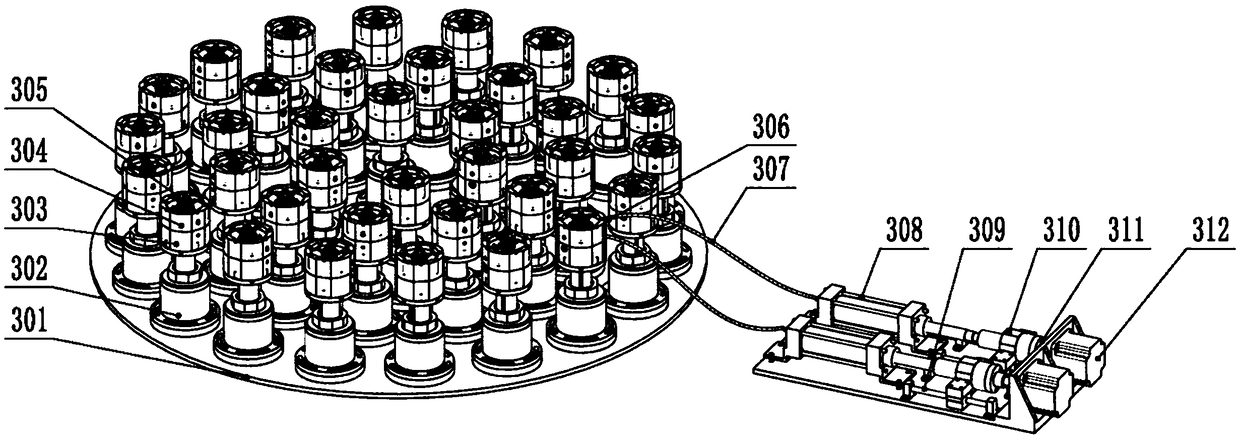
[0032] Such as Figure 1 to Figure 4 As shown, a large-scale optical mirror processing equipment of a multi-parallel co-integration robot includes a processing unit, a large mirror support unit, and a mirror rotation fixing unit 2. The processing unit includes a processing tool unit and a processing tool during optical mirror processing. A drive mechanism that provides the required path, processing force and processing attitude; the large mirror support unit includes an L-shaped support frame 1, and the mirror rotation and fixing unit 2 is arranged on the upper end of the horizontal platform of the L-shaped sup...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More