

Structural light vision sensor and rapid calibration method
A technology of visual sensor and calibration method, which is applied in the direction of instruments, optical devices, measuring devices, etc., can solve the problem of not being able to obtain multiple non-collinear light spots quickly and conveniently, and achieve the effect of reducing steps and making steps simple and convenient
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be further described below in conjunction with the accompanying drawings.
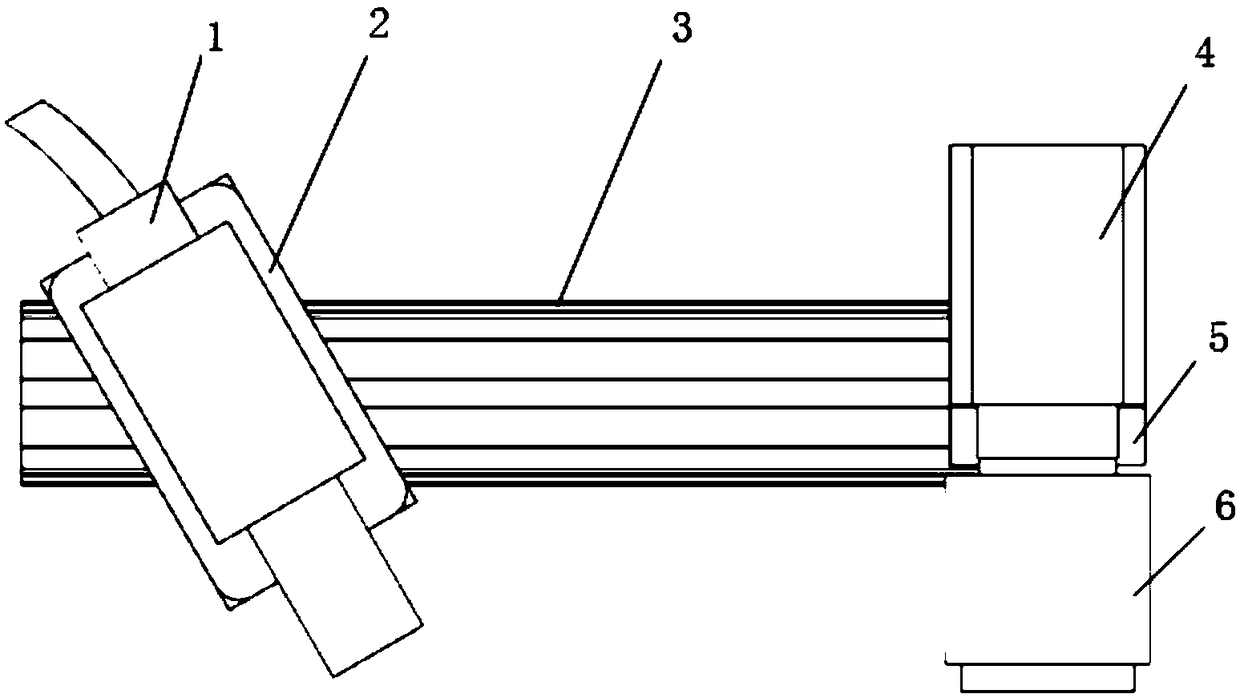
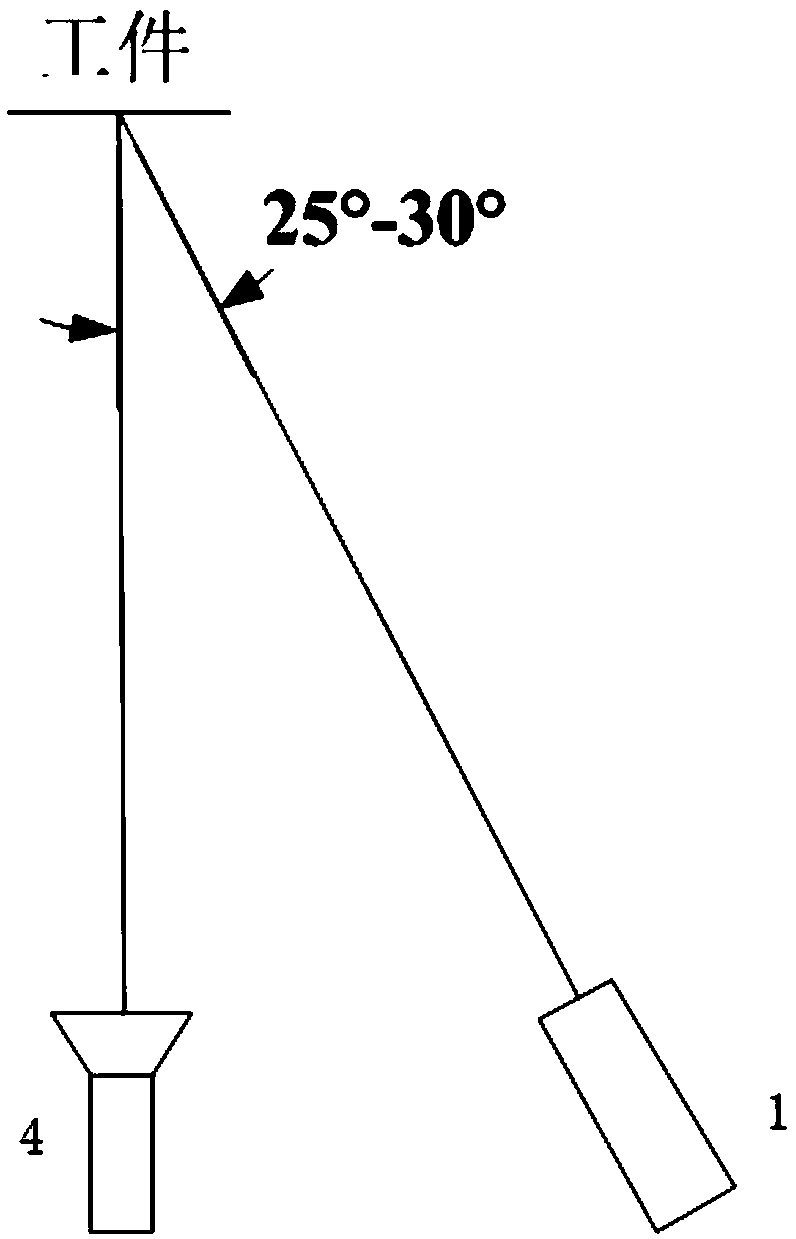
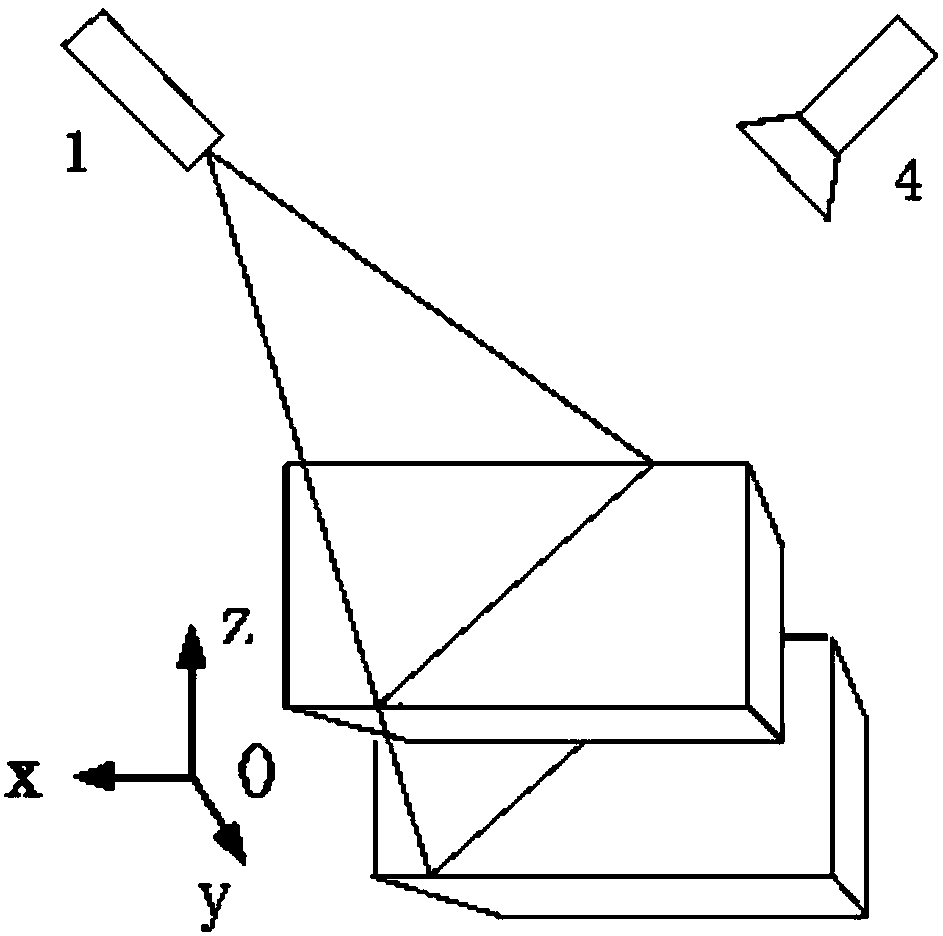
[0030] Structured light vision sensors such as figure 1 As shown, a structured light laser 1, a laser base 2, a fixed bracket 3, a camera 4, a camera base 5 and a lens 6 are composed. In this embodiment, the model of camera 4 is Baumer TXG50, the pixel resolution is 2448×2050, and the pixel size is 3.45 μm×3.45 μm; the model of lens 6 is Kowa LM25JC5M2; the model of structured light laser 1 with a power of 10 mW is STR-660- 10-CW-FL-L01-20-S-XX Laser. The camera 4 is fixed perpendicular to the horizontal plane, and the angle between the optical axis of the laser and the optical axis of the camera is between 25° and 30°, figure 2 A schematic diagram of the angle between the two.
[0031] The quick calibration method based on the above-mentioned structured light vision sensor is as follows:
[0032] 1. Calibration of internal and external parameters of the camera: T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More