

Linear segment feature-based high-precision carrying robot positioning and navigating method
A positioning navigation and robot technology, applied in the field of high-precision positioning and navigation of transport robots, can solve the problems of large accumulated errors, laser radar online scanning interference, inability to apply precision, accuracy in industrial fields, etc., and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0074] This embodiment shows a high-precision positioning and navigation method for a carrier robot based on straight line features, including the following steps:
[0075] S1) Dynamic model of autonomous positioning and navigation car:
[0076] (1)
[0077] (2)
[0078] (3)
[0079] (4)
[0080] (5)
[0081] The position of the trolley center O’ at the next moment is obtained by using the second-order Runge-Kutta iterative formula (Formula 6):
[0082] (6)
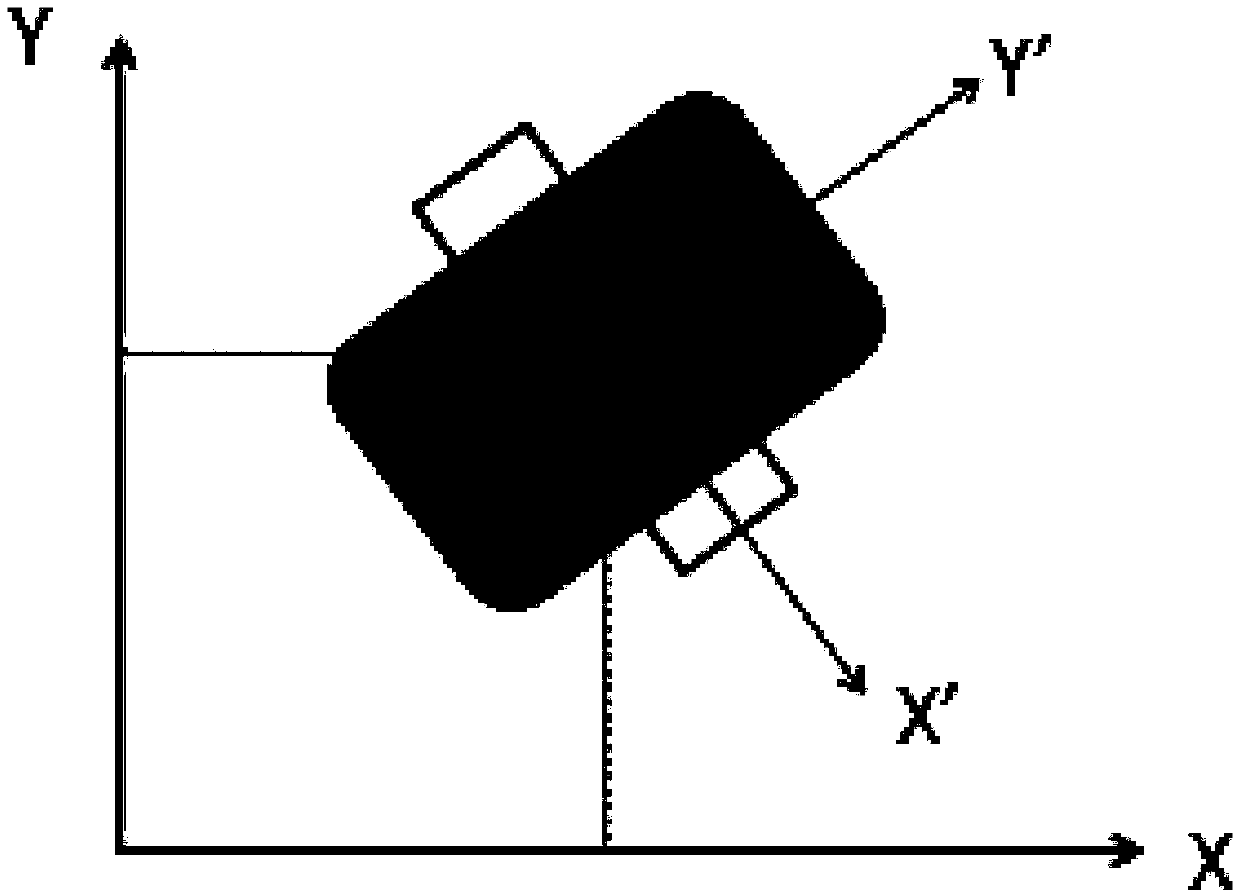
[0083] refer to figure 1 ,in, L and R represent the angular velocity of the left wheel and the right wheel respectively, v L and v R Represent the linear velocity of the left wheel and the right wheel respectively, and v represent the linear velocity of the center O' of the trolley, E is the rotational angular velocity of the trolley, r is the radius of the trolley wheel, L is the distance between the two wheels, G is the angular velocity measured by the gyroscope;
[0084] S2) Use t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More