

Method for estimating spatial rotation non cooperative target spindle based on vision SLAM (Simultaneous Localization And Mapping)
A non-cooperative target and space rotation technology, which is applied in the field of estimating the rotation axis of non-cooperative targets in space rotation, can solve the problems of poor accuracy, non-cooperative target recognition and detection, and non-consideration, so as to achieve the effect of improving accuracy and solving poor accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0061] Specific implementation mode 1: In this implementation mode, the specific process of estimating the rotation axis of a non-cooperative target in space rotation based on visual SLAM is as follows:
[0062] Step 1. Use the ImageNet database to pre-train the YOLO target detection model; input the non-cooperative target images obtained in the previous stage into the pre-trained YOLO target detection model for training, and obtain the trained YOLO target detection model;
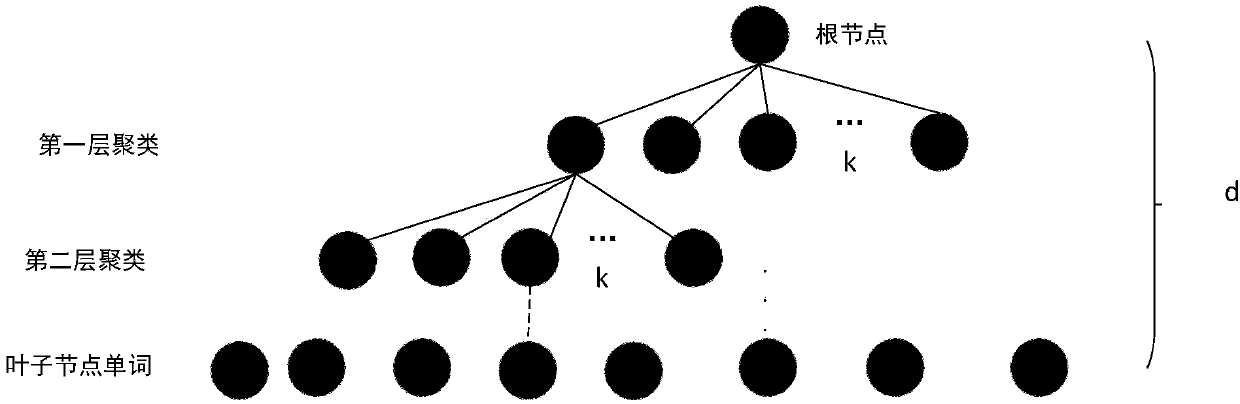
[0063] Step 2. Extract ORB feature points from the non-cooperative target image information obtained in the previous stage, and use the K-means algorithm to perform clustering to establish a k-cross number dictionary;
[0064] The specific process is:
[0065] Use the non-cooperative target rotation axis obtained in the early stage to build a dictionary to prepare for the subsequent loop detection;
[0066] The process of creating a dictionary is:
[0067] First, extract the ORB feature points from the n...
specific Embodiment approach 2
[0120] Specific embodiment 2: the difference between this embodiment and specific embodiment 1 is that in the first step, the ImageNet database is used to pre-train the YOLO target detection model; the non-cooperative target picture obtained in the previous stage is input into the pre-trained YOLO target detection The model is trained to obtain the trained YOLO target detection model; the specific process is:
[0121] The YOLO target detection model is a convolutional neural network, which includes 24 convolutional layers, 4 pooling layers and 2 fully connected layers, respectively:
[0122] 1 convolutional layer with a convolution kernel size of 7*7 and a number of 64;
[0123] 1 maximum pooling layer of 2*2;
[0124] 1 convolutional layer with a convolution kernel size of 3*3 and a number of 192;
[0125] 1 maximum pooling layer of 2*2;
[0126] 1 convolutional layer with a convolution kernel size of 1*1 and a number of 128;
[0127] 1 convolutional layer with a convolut...
specific Embodiment approach 3
[0143] Embodiment 3: This embodiment differs from Embodiment 1 or Embodiment 2 in that: the size of the obtained non-cooperation target pictures is 448×448, the number of pictures is more than 800, and labels have been prepared.
[0144] Other steps and parameters are the same as those in Embodiment 1 or Embodiment 2.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More