

Flexible hip joint assistance exoskeleton
A technology of hip joints and exoskeletons, which is applied in the direction of devices to help people walk, physical therapy, etc., can solve the problems of rigid frame structure mechanical inertia danger, poor comfort and convenience, and lack of psychological identity of users, so as to improve safety Sex and comfort, easy to wear, and the effect of reducing the burden on the legs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be further described below in conjunction with the accompanying drawings and specific examples of implementation, but not as a limitation of the present invention.
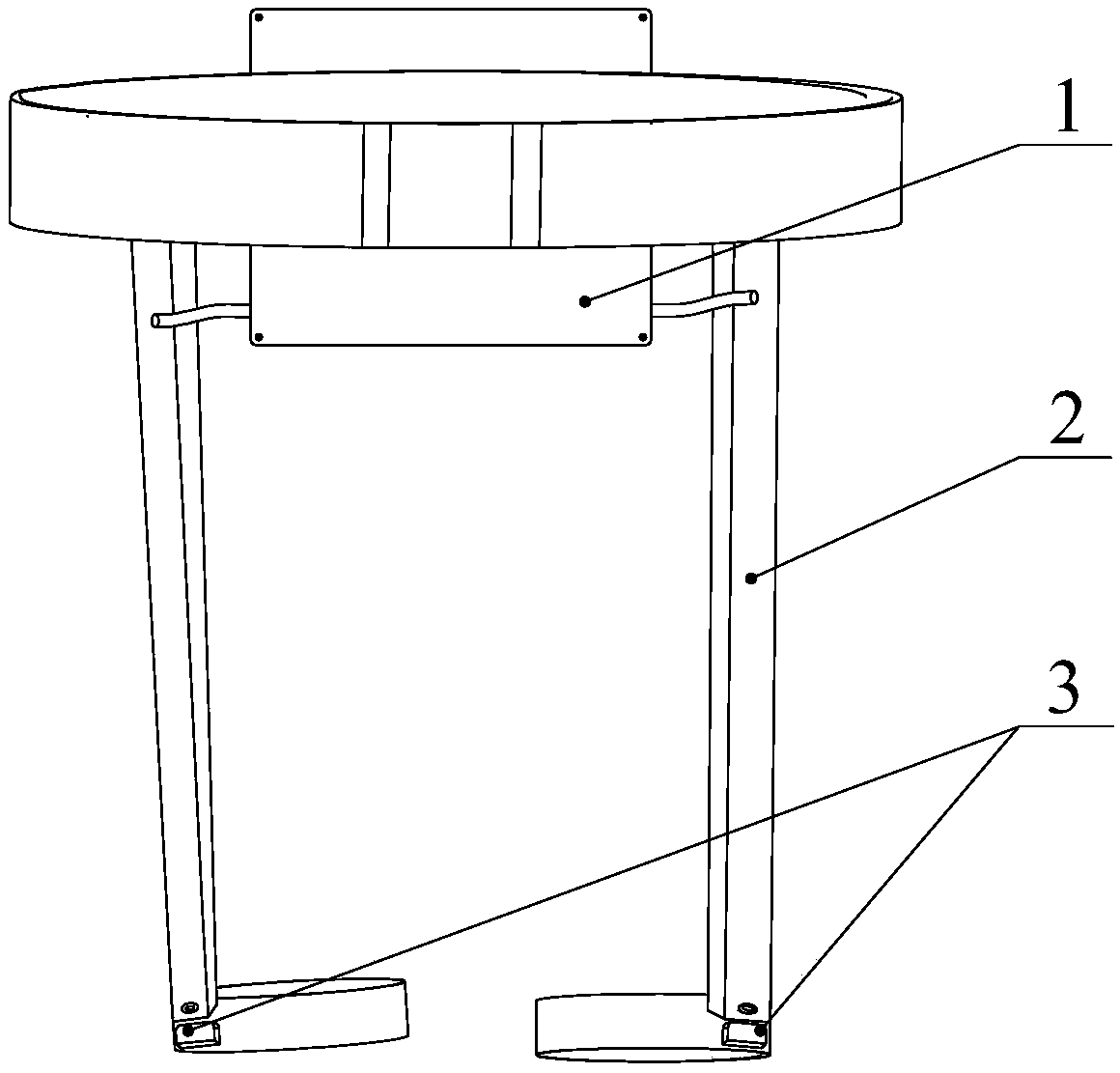
[0038] Such as figure 1As shown, a flexible hip joint booster exoskeleton is mainly composed of a negative pressure control system 1 , a hip joint flexible booster component 2 and an inertial measurement unit component 3 .
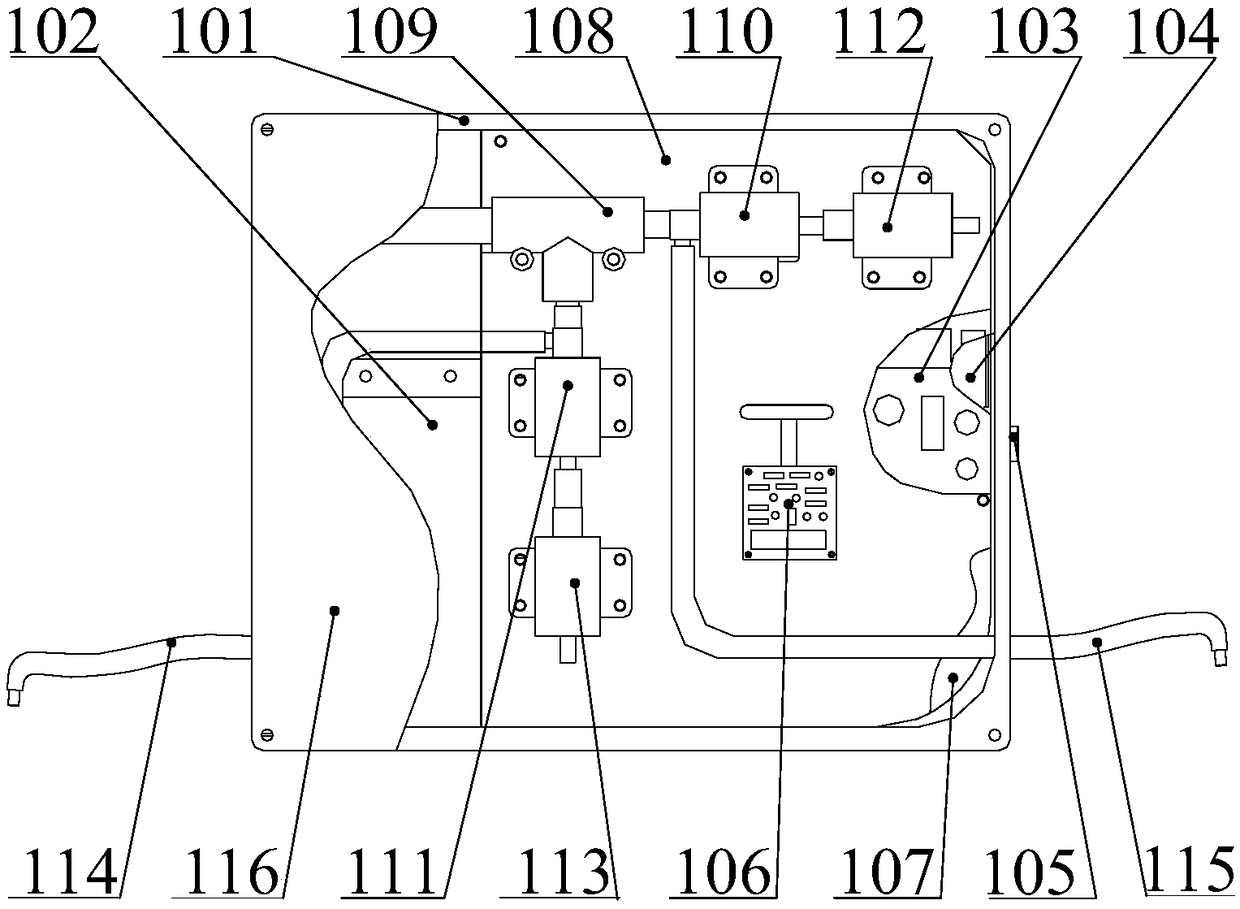
[0039] The negative pressure control system 1 is the control center of the flexible hip-assisted exoskeleton, which is responsible for the data processing, drive control and negative pressure output control of the flexible hip-assisted exoskeleton. The joint flexible power assist component provides negative pressure input and negative pressure unloading, providing users with assisting hip joint movement consistent with gait.
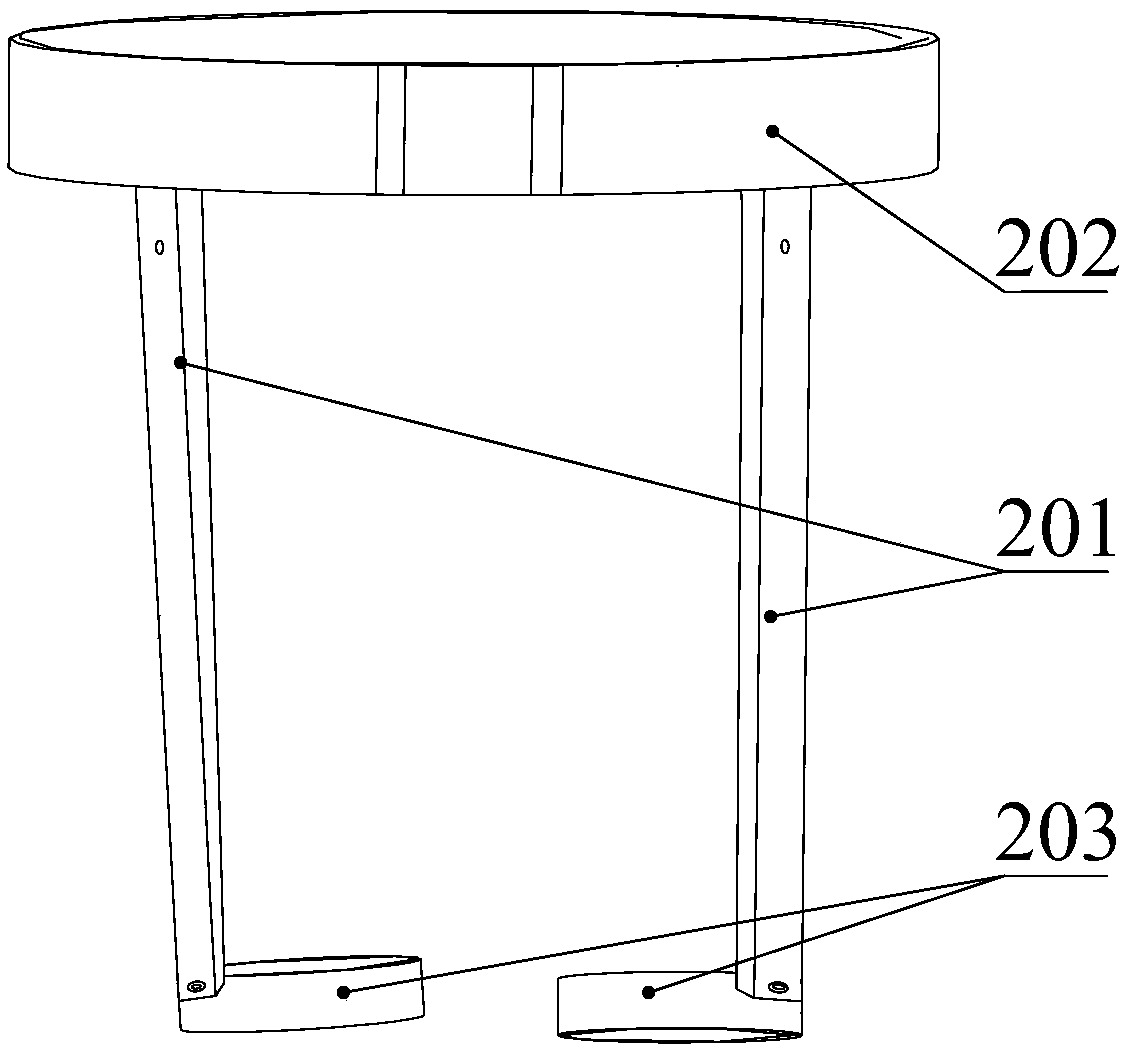
[0040] The hip joint flexible assisting component 2 is the execution part of the hip joint flexible assisting of the left and right le...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More