

A control method of the robot arm based on the least squares method for robot experiment teaching
A technology of least squares method and control method, applied in general control systems, manipulators, program control, etc., can solve the problems of difficult to accurately realize two-link mechanism, great influence of grasping, and complex value, and achieve convenient The effect of experimental teaching, improving picking efficiency and simplifying calibration steps
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
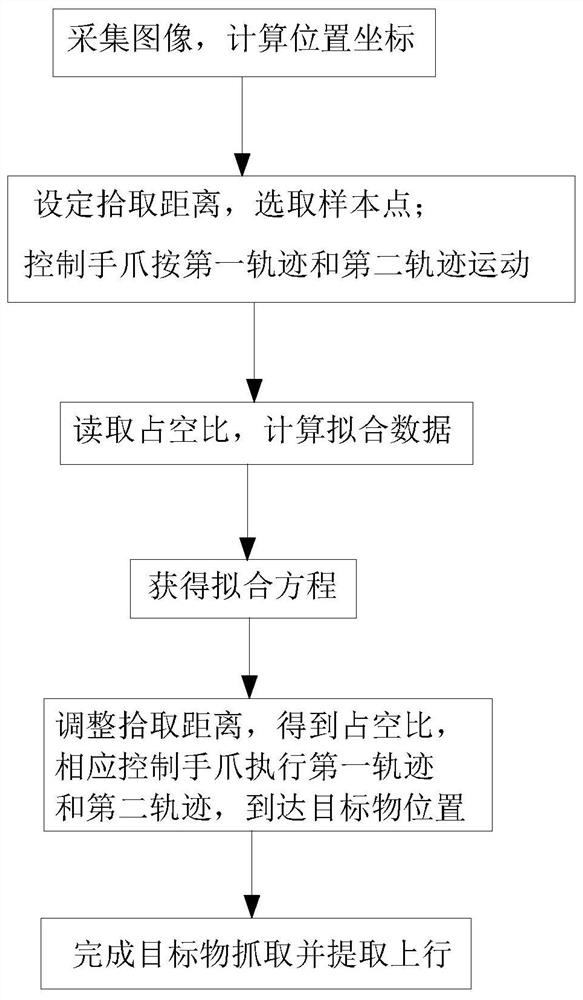
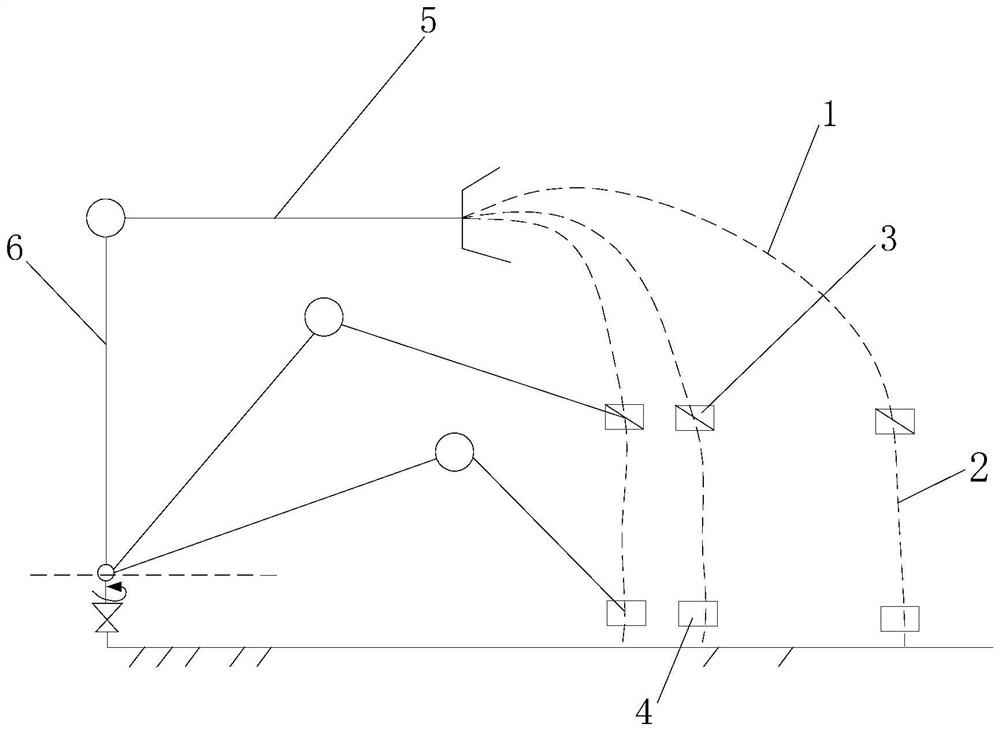
[0031] refer to figure 1 and figure 2 , a kind of robot experiment teaching of the present invention uses the mechanical arm control method based on least squares method, comprises the following steps:
[0032] Collect the target image, and calculate the position coordinates of the target through the target image;
[0033] Set the pick-up distance, that is, the distance xi from the center of rotation of the robotic arm to the gripper, select several first sample points 3 and second sample points 4 according to the position target, and use the swing servo to control the gripper to follow the first trajectory 1 in sequence and the second track 2 to move; wherein, the several first sample points 3 / second sample points 4 are arranged horizontally, and each second sample point 4 is located at the corresponding first sample point 3 directly below; the trajectory from the initial position to each first sample point is the first trajectory 1, and the trajectory from each first samp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More