

Front-vehicle ranging method based on monocular vision and image segmentation under vehicle-borne camera
A distance measurement method and monocular vision technology, applied in the field of computer vision, can solve the problems of providing security, reducing detection efficiency, and easily introducing errors, etc., to achieve the effect of saving depth calculation time, ensuring driving vision, and reasonable driving judgment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
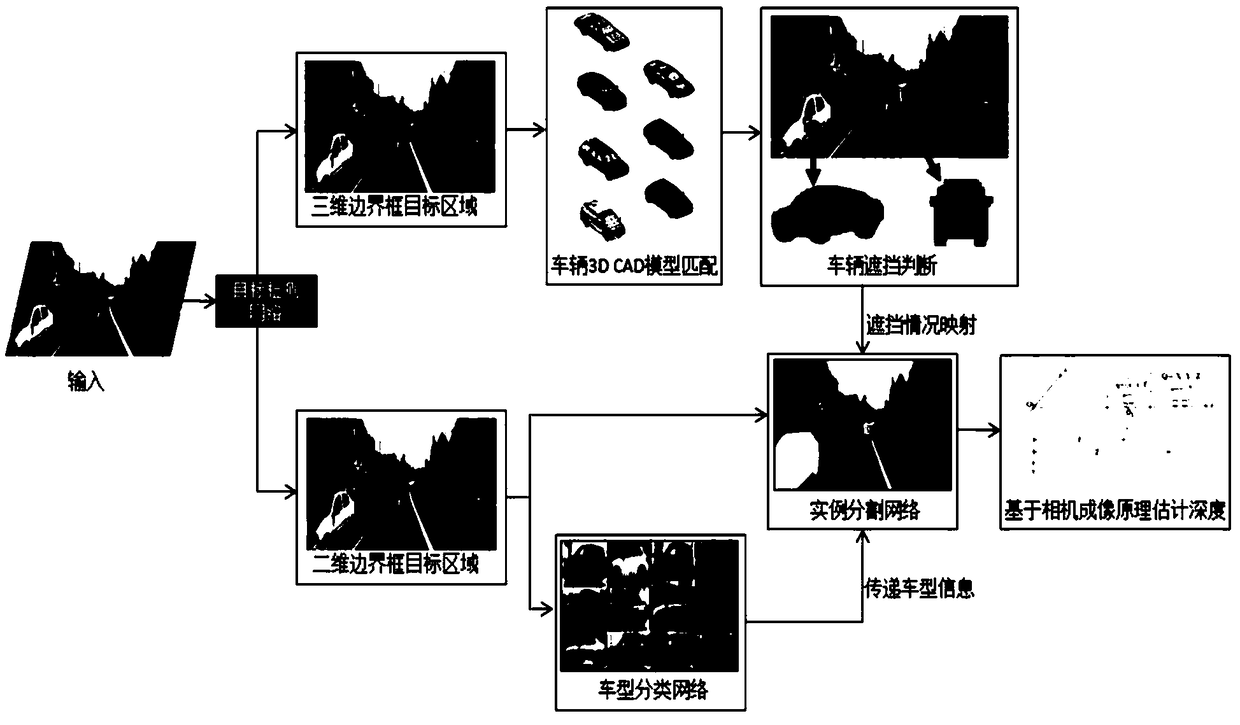
[0047] Such as figure 1 As shown, a front vehicle ranging method based on monocular vision and image segmentation under a vehicle camera, including the following steps:
[0048] Step S1: read the image frame by frame from the video stream captured by the vehicle camera;
[0049] Step S2: Carry out object detection on the vehicle, and extract the position information of the vehicle in the image, including two-dimensional bounding box information and three-dimensional bounding box information;
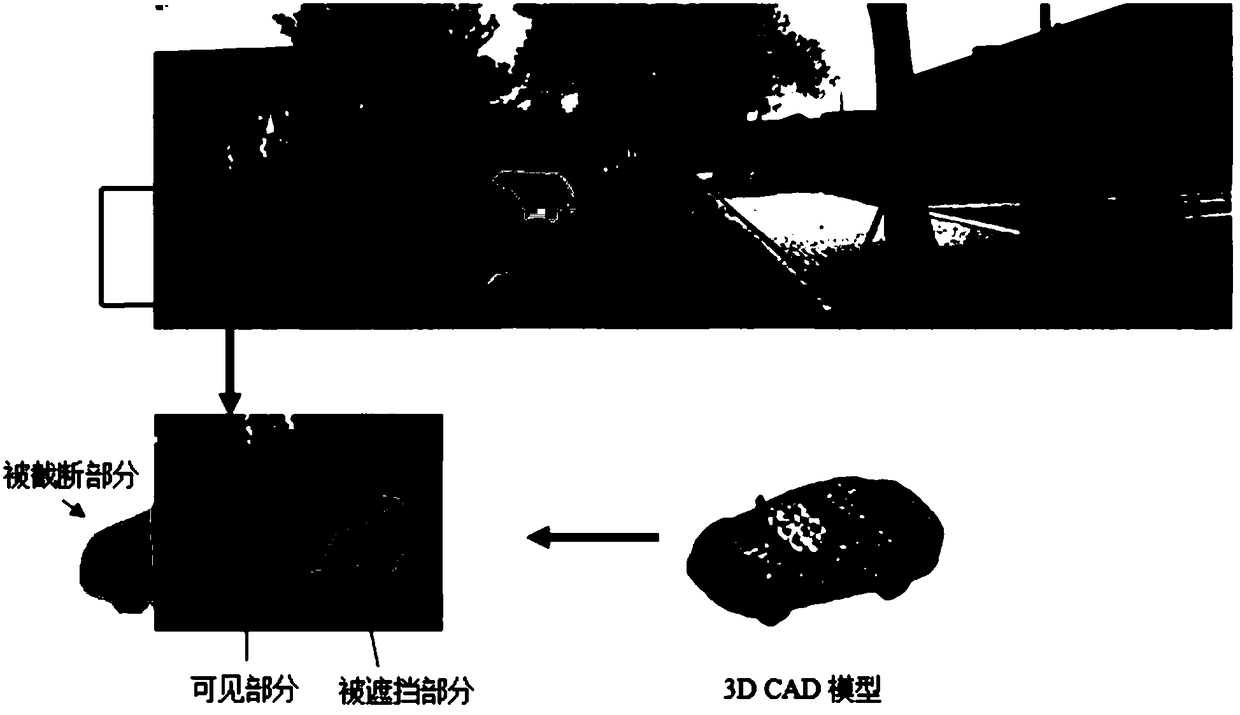
[0050] Step S3: matching the CAD model of the corresponding vehicle in the preset vehicle 3D CAD model library according to the three-dimensional bounding box information;
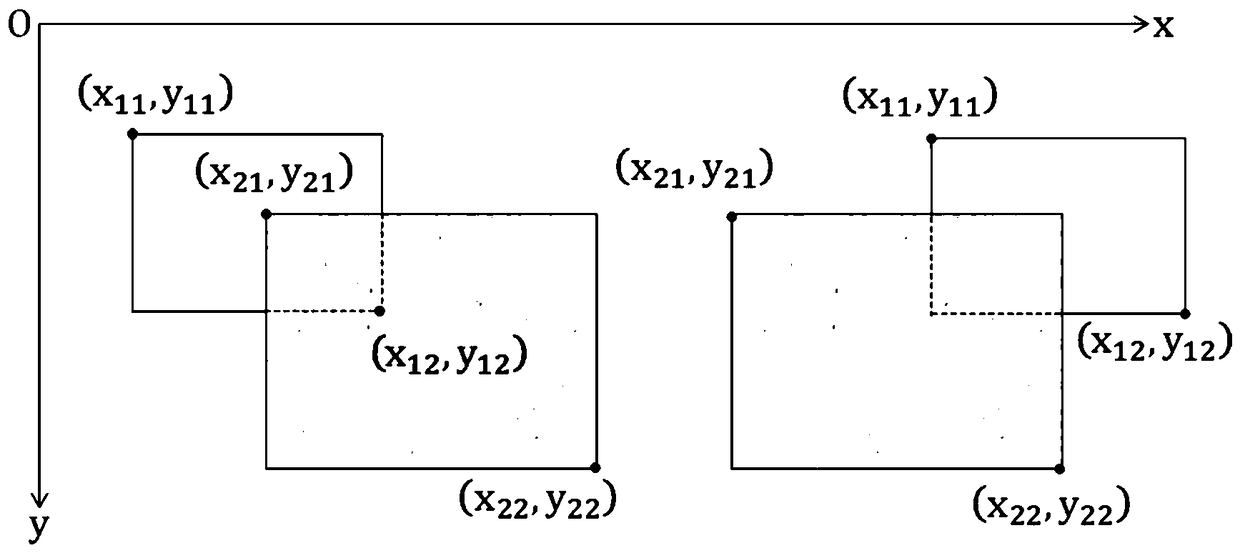
[0051] Step S4: Determine the distance of the overlapping vehicle according to the two-dimensional bounding box information of the vehicle, and determine the occlusion information of the veh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More