

Variable probability bidirectional rapidly-exploring random tree improved path planning algorithm
A path planning and random tree technology, which is applied in the direction of motor vehicles, non-electric variable control, vehicle position/route/height control, etc., to reduce the amount of calculation, increase the search speed, reduce the path length and the number of nodes
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] In actual use, due to the volume of the vehicle itself, the edge of the state space and the center of the vehicle (X, Y) actually need to keep a distance. Therefore, when importing the state space diagram, it is necessary to set the state space according to the vehicle volume. Preprocessing, the edge of the state space is extended and protected to prevent nodes from being too close to the edge of the state space, resulting in collisions.
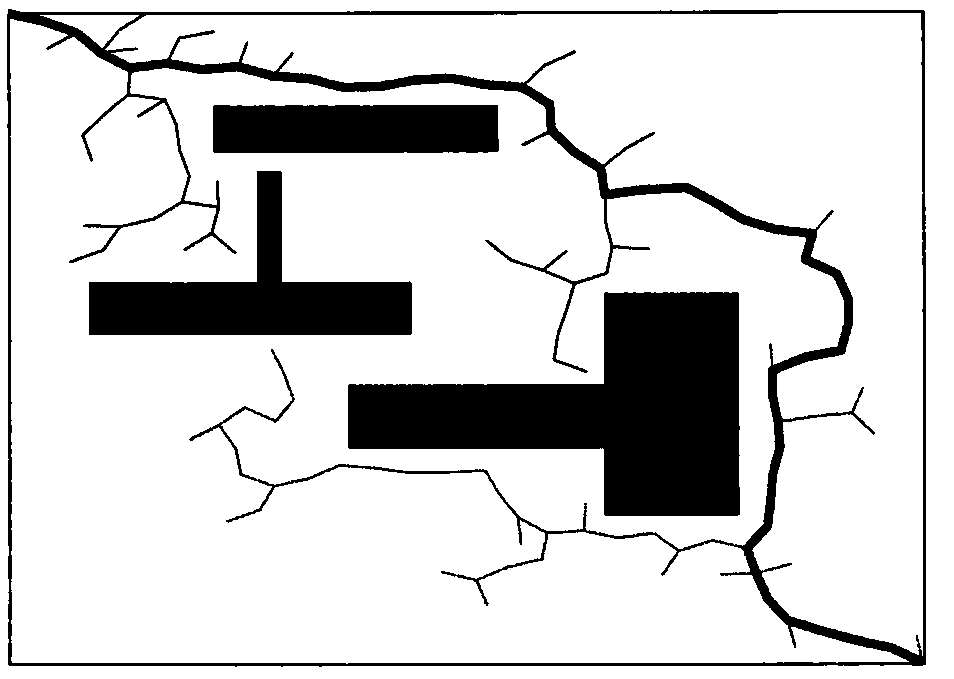
[0020] A variable probability target selection strategy based on the node environment is adopted, that is, after a node is generated, the function detect(q) is used to detect whether there is an occlusion (that is, a point not included in the available state space) within a single distance interval around the node. If it exists, choose the end point as the target point to expand once to obtain a tree node; otherwise, use a set target bias probability value Pset (generally set to be less than 10%), when the random generation probability...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More