

Lower limb rehabilitation robot compliance control method based on variable admittance
A rehabilitation robot and compliance control technology, applied in gymnastics equipment, muscle training equipment, passive exercise equipment, etc., can solve the problems of lack of adaptive adjustment, poor control compliance of rehabilitation robots, and inability to effectively guarantee the compliance of the control process, etc. , to achieve the effect of improving flexibility and individual adaptability, and improving the level of human-computer interaction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] Below in conjunction with accompanying drawing and specific embodiment the present invention will be further described:
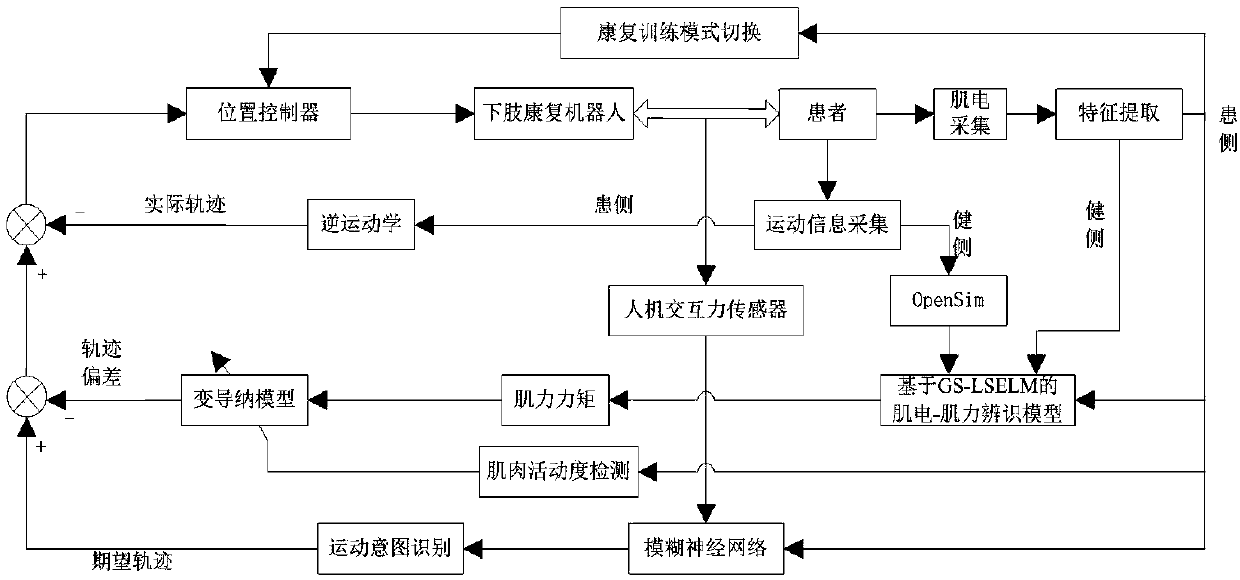
[0025] see figure 1 and Figure 4 , a kind of compliant control method of lower limb rehabilitation robot based on variable admittance described in the present invention is: utilize Delsys myoelectric acquisition system and motion capture equipment to synchronously collect patient's lower limb surface electromyography signal and motion information, and the affected side and healthy side The electromyographic signals of the lower limbs are compared and analyzed, and the active and passive modes of the patient's rehabilitation training are switched accordingly; secondly, the fuzzy neural network is used to fuse the electromyographic signals of the patients' lower limbs and the human-computer interaction force information to identify the movement intention of the patients' lower limbs, Obtain the expected trajectory of the patient's lower limbs, and at...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More