

High-precision control interpolation algorithm
An interpolation algorithm and high-precision technology, applied in the direction of program control, computer control, general control system, etc., can solve problems such as low algorithm execution efficiency, difficult coordination of axis speed, cumbersome acceleration and deceleration, etc., to reduce design difficulty and linkage control Simple, concise software writing effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] In order to enable those skilled in the art to better understand the solution of the present invention, the technical solution of the present invention will be described in detail below in conjunction with the embodiments of the present invention and the accompanying drawings.
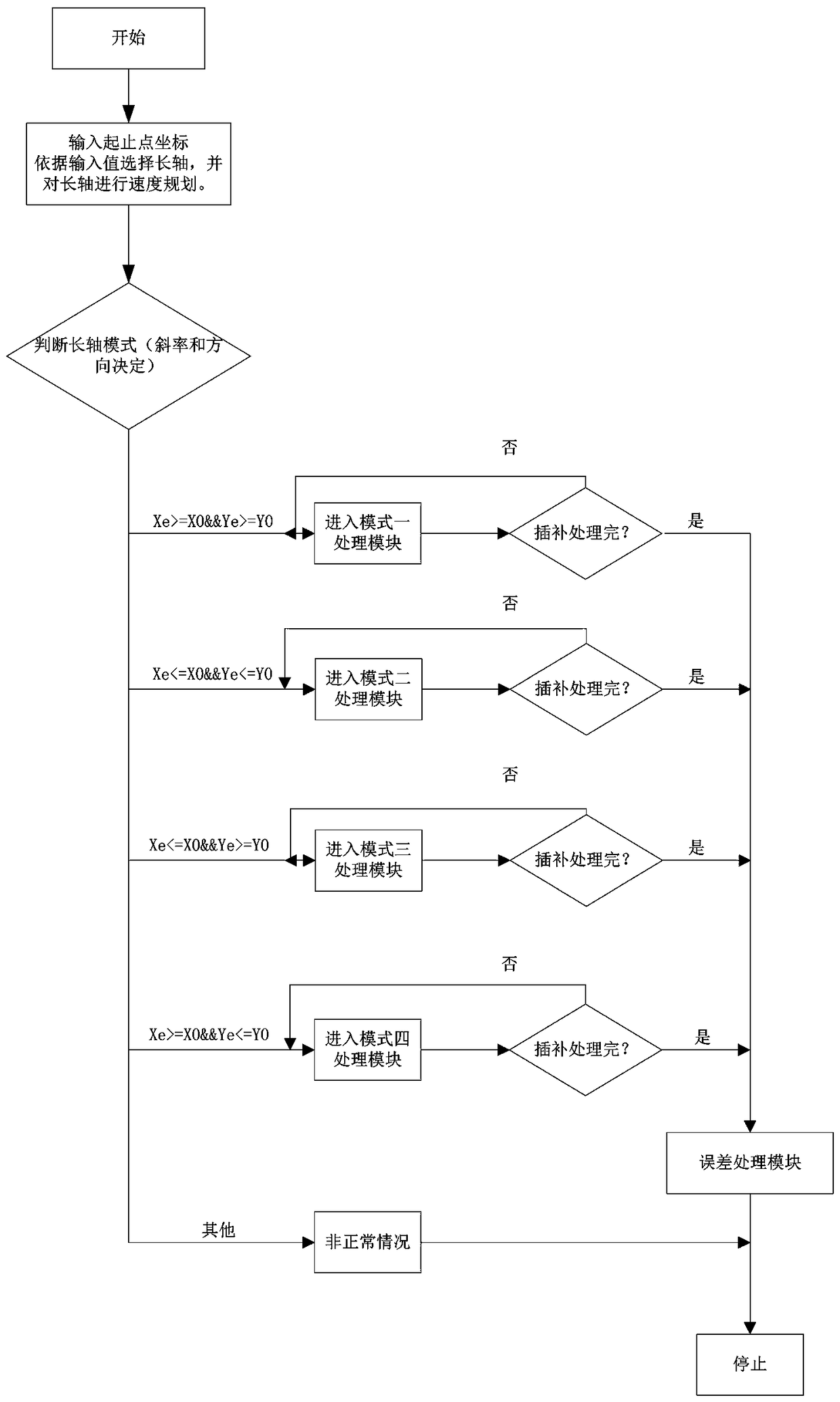
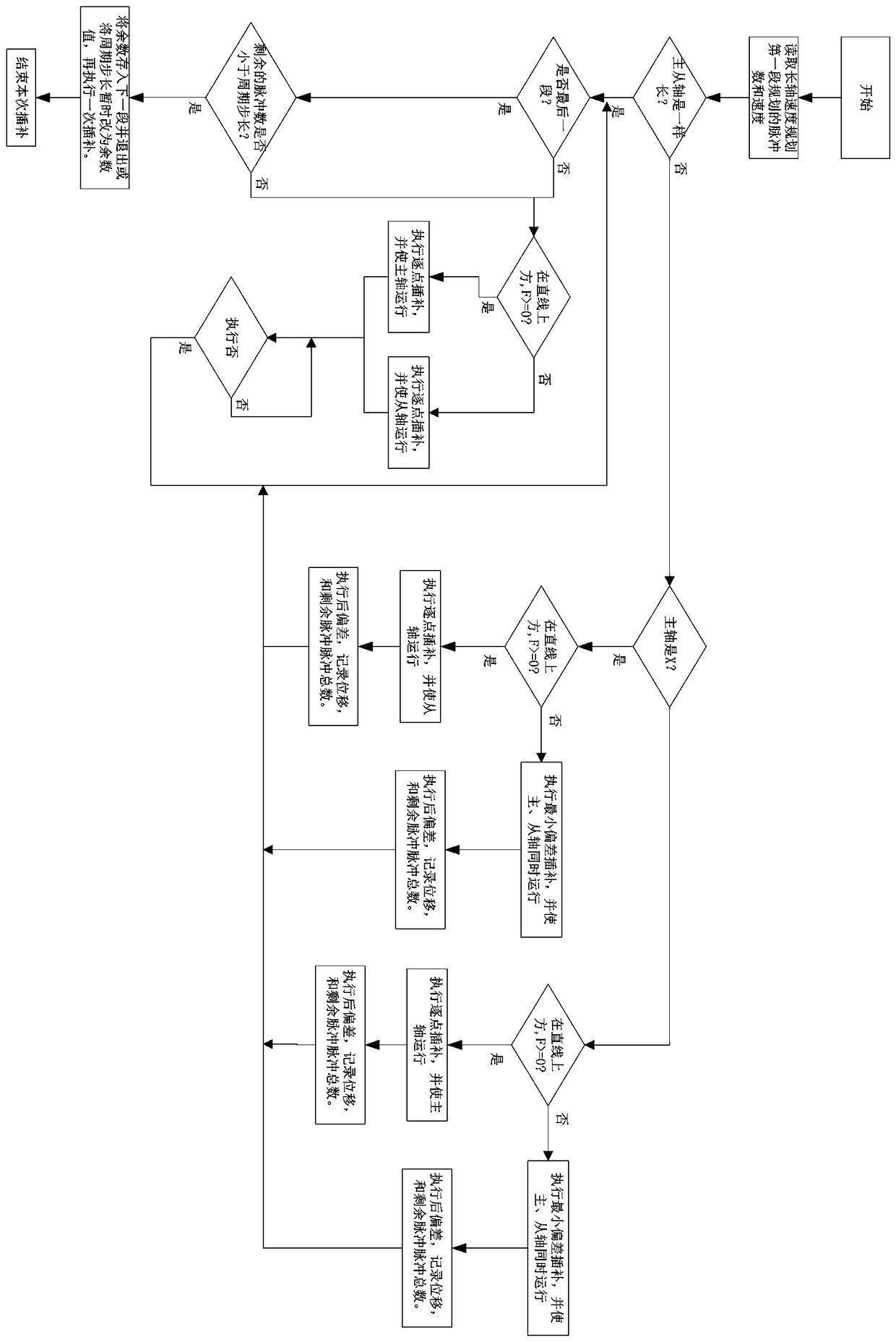
[0022] like figure 1 , figure 2 As shown, the interpolation algorithm of high-precision control of the present invention comprises the following steps:
[0023] Step 1: Through the target trajectory, map to each axis, select the one with the longest displacement as the main axis, and set the parameters;
[0024] This embodiment combines point-by-point and minimum deviation, and divides possible situations into the following modes:
[0025] Mode1: Xe>=X0&Ye>=Y0;
[0026] Mode2: Xe<=X0&Ye<=Y0;
[0027] Mode3: Xe=Y0;
[0028] Mode4: Xe>=X0&Ye<=Y0;
[0029] Among the four modes, the following three situations are divided according to the difference between the master and slave axes:
[0030]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More