

Method for grabbing borrowed book
A book and library technology, applied in the field of borrowing and borrowing books, can solve problems such as accident-prone, low reliability, and incapable of accurate grasping
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
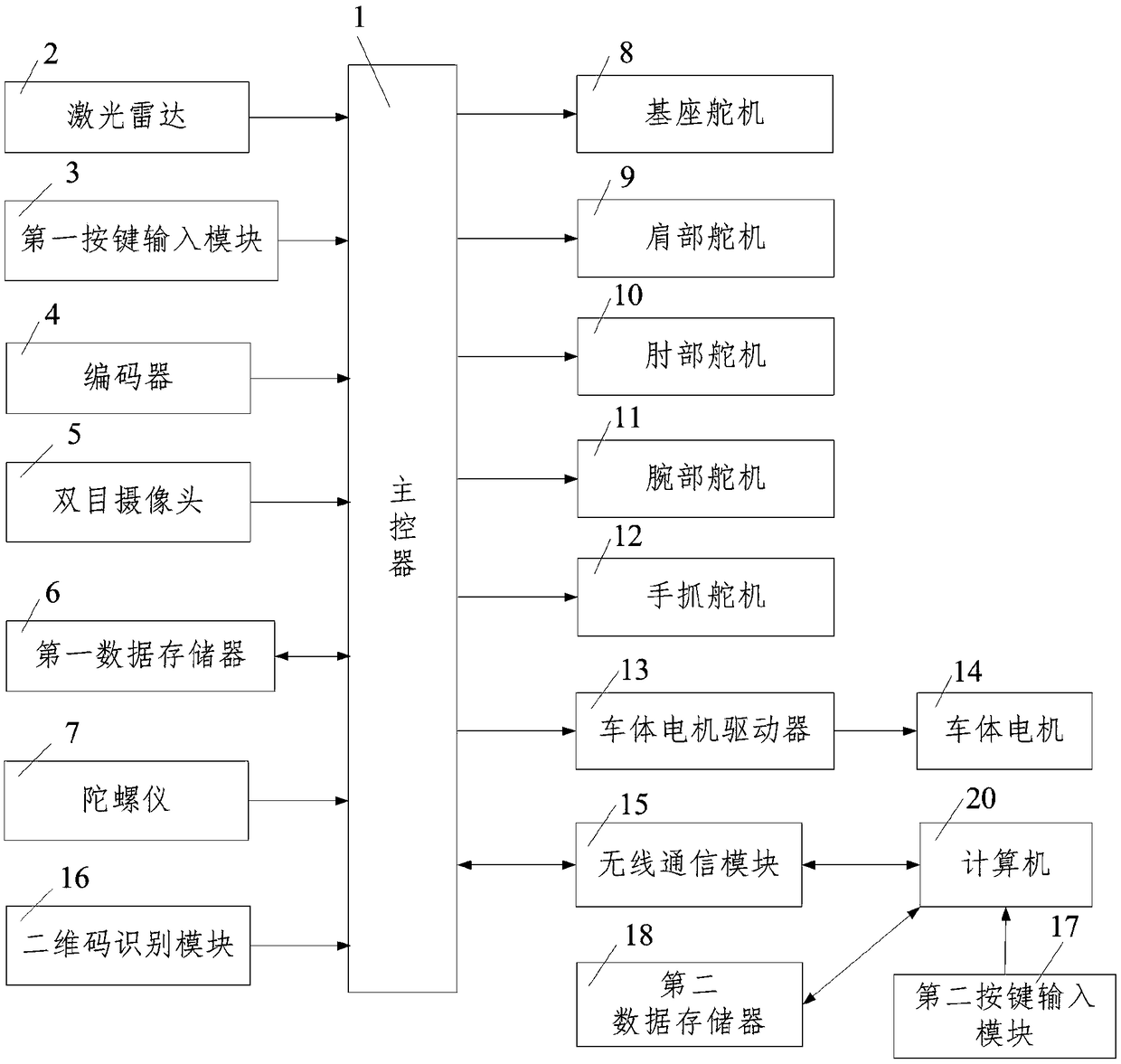
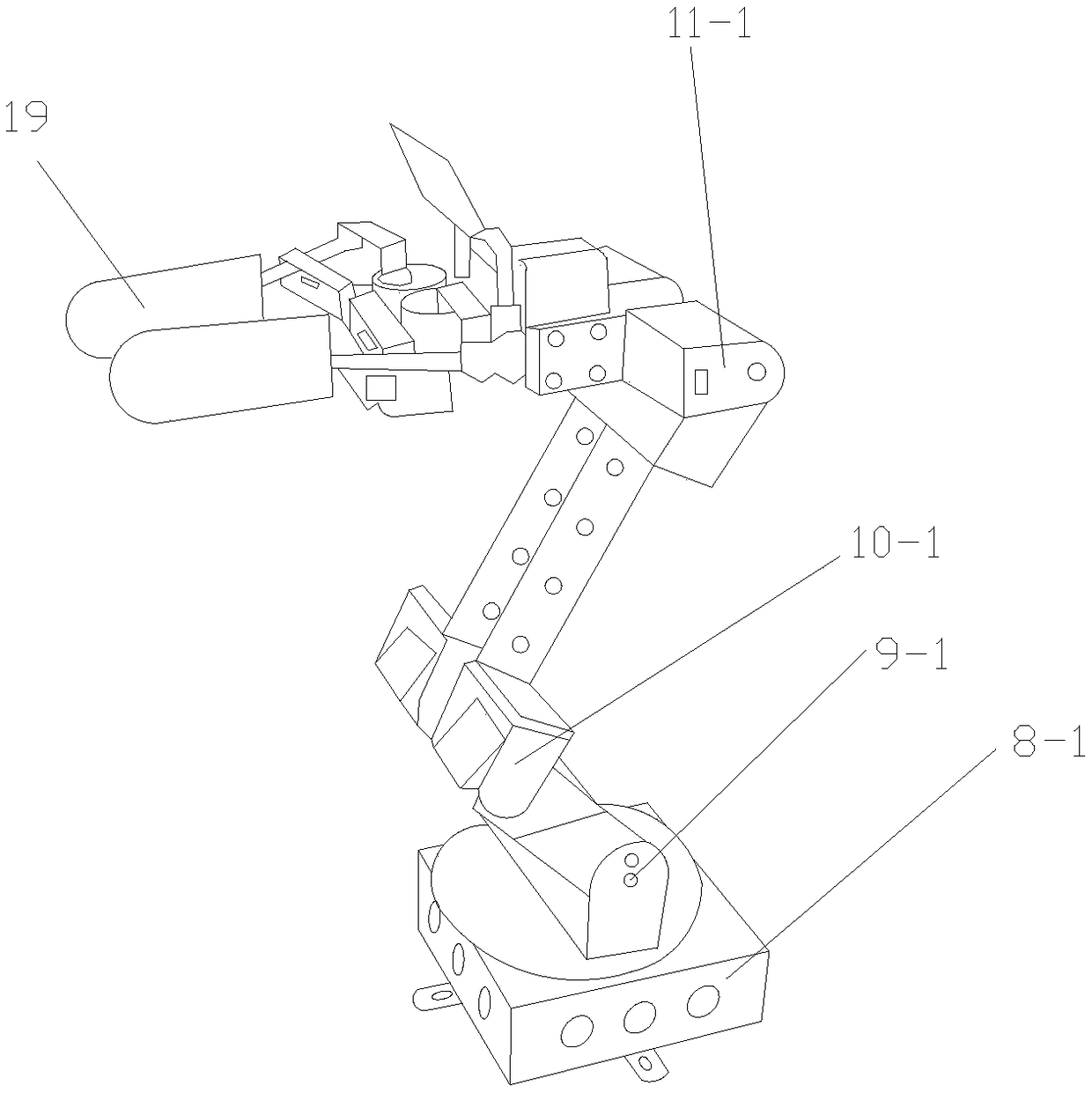
[0067] Such as figure 1 , figure 2 and image 3As shown, the device adopted in the present invention includes a control module, a manipulator mechanism for grabbing books, and a car body mechanism for the installation of the manipulator mechanism. The manipulator mechanism includes a base 8-1, and a base 8-1 The shoulder 9-1 that is rotatably connected, the elbow 10-1 that is rotatably connected with the shoulder 9-1, the wrist 11-1 that is rotatably connected with the elbow 10-1, and the hand grip that is arranged on the wrist 11-1 19. The control module includes a main controller 1, a wireless communication module 15 connected to the main controller 1, and a first data storage 6, and the vehicle body mechanism includes a vehicle body and a vehicle body that drives the vehicle body Drive mechanism, the input terminal of described main controller 1 is connected with lidar 2, the first button input module 3, encoder 4, binocular camera 5 and two-dimensional code identificati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More