

Unmanned aerial vehicle cluster formation interactive simulation verification system and implementation method thereof
A technology of simulation verification and human-computer interaction equipment, which is applied in the field of UAV cluster formation interactive simulation verification system and its realization, which can solve the problems of long research and development cycle, lack of intuitive results, and complex construction of semi-physical simulation system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific example
[0086] 1. System hardware and software configuration
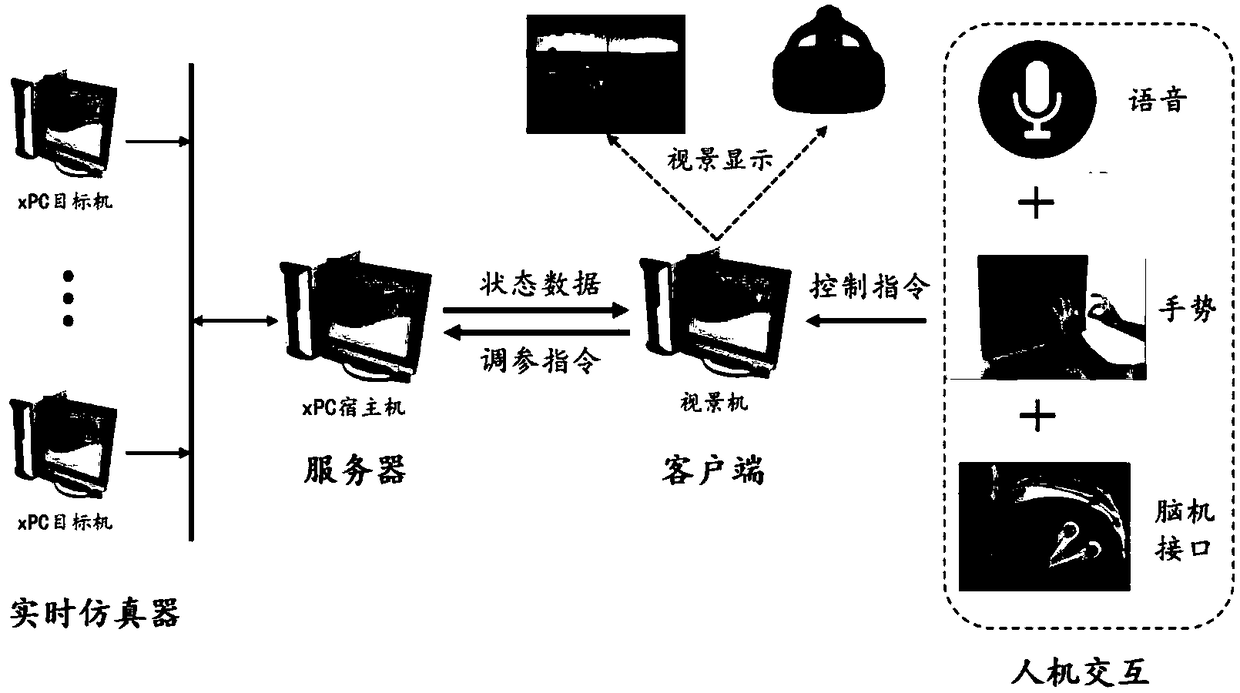
[0087] according to this section figure 1 The overall structure of the platform is shown, and the hardware configuration used in this example is shown in the following table:
[0088]
[0089] The software implementation methods of this example include: the xPC real-time simulation program is developed by Matlab / Simulink; the server-side software is written based on C# language and Visual Studio 2010; the client software is based on the Unity 3d engine, and SteamVR, Orion SDK, Baidu voice REST API plug-in development .
[0090] 2. Simulation example of UAV swarm formation control method
[0091] Establish the UAV particle motion model and design the formation controller. The inner and outer loop control structure is adopted, in which the outer loop obtains the desired motion state, and a PID (proportional-integral-differential) controller is designed to obtain the desired attitude of the inner loop attitude, and the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More