

Real-time vehicle trajectory prediction method for signalized intersection
A vehicle trajectory and signal control technology, applied in the field of traffic information, can solve the problem of low applicability of signal control intersections
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
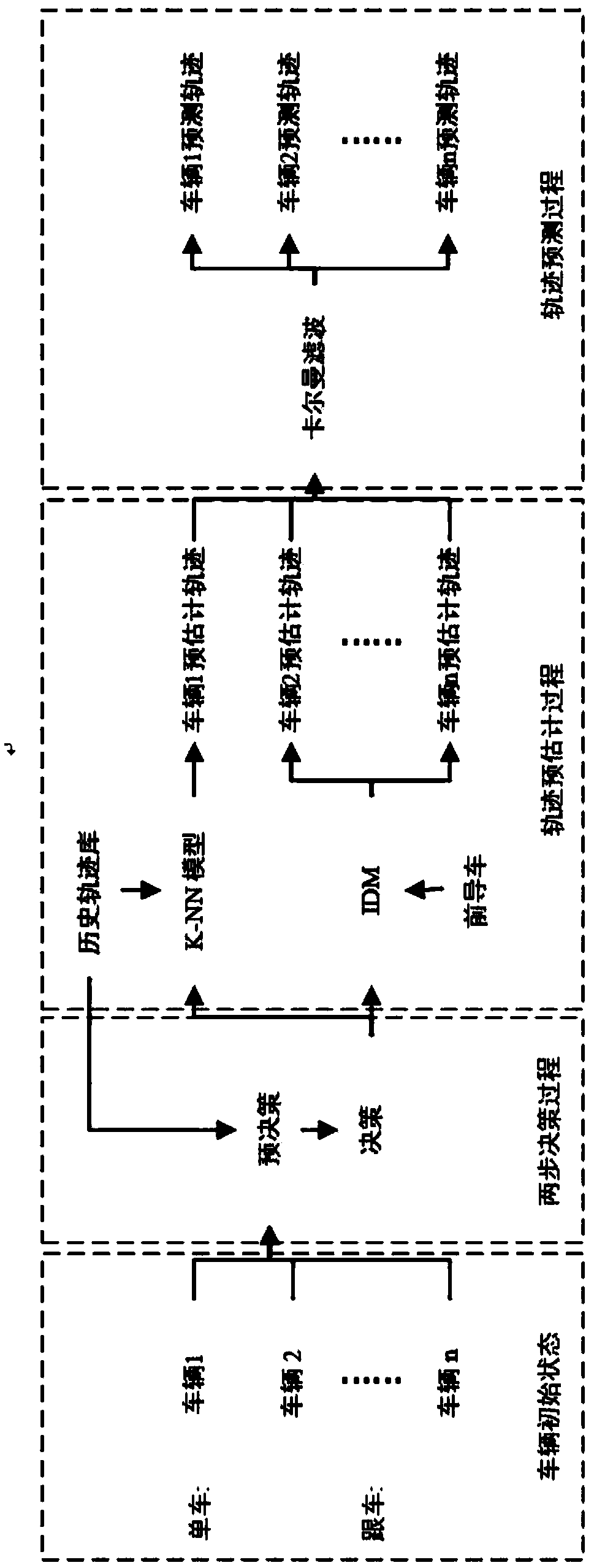
[0094] Embodiment 1: A real-time vehicle trajectory prediction method suitable for signal-controlled intersections, the specific flow chart is as follows figure 1 shown. It can be roughly divided into four main steps:
[0095] 1) Extract trajectory data and establish a historical trajectory database.
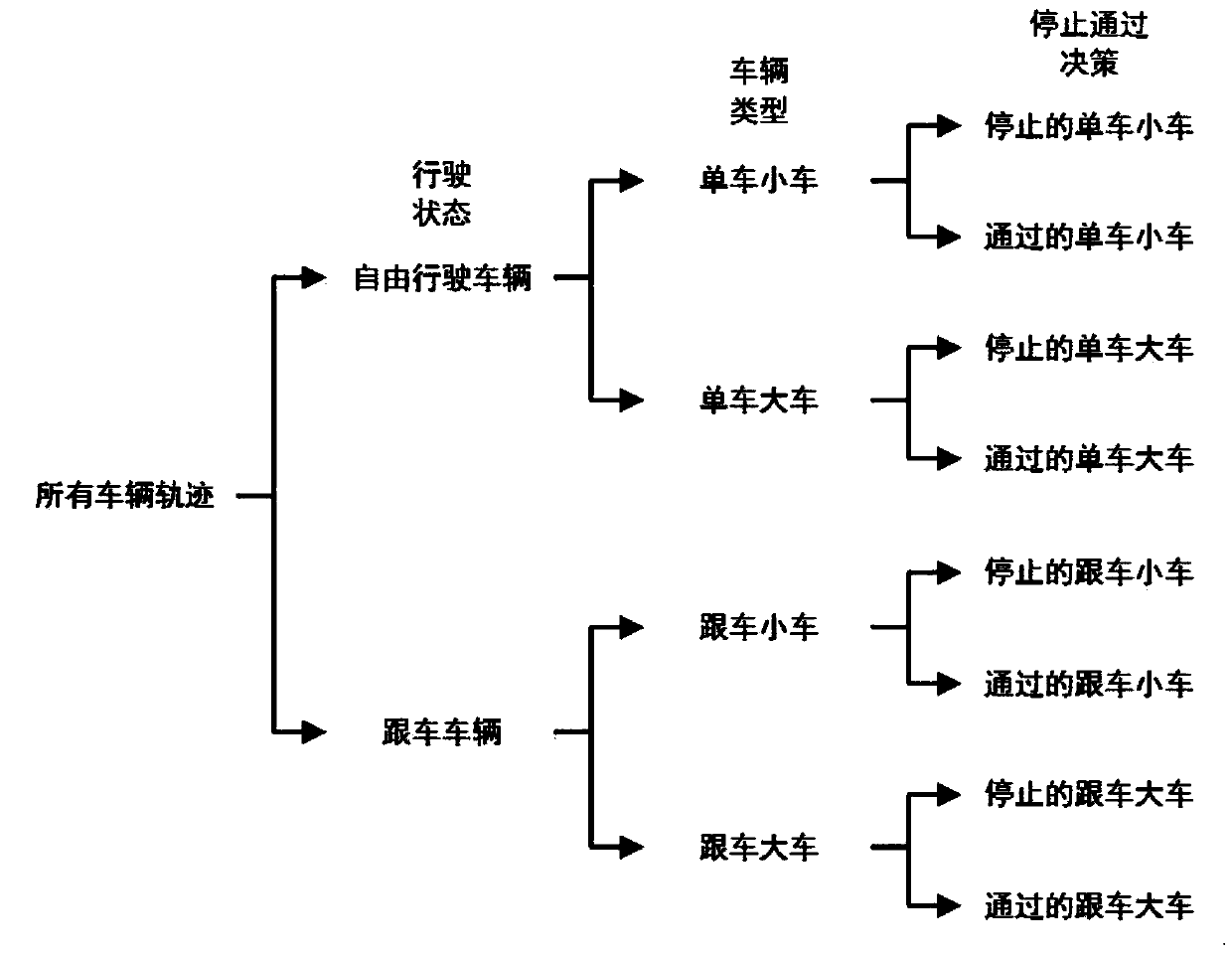
[0096] Aiming at the three main factors that affect the trajectory characteristics of intersection vehicles during signal switching: driving performance, decision-making behavior, and the influence of the leading vehicle in the process of car-following, the vehicle trajectory is based on the type of vehicle (large car and small car), the state of car-following (free driving and following), decision-making behaviors (passing and stopping) are divided into 8 types, including stopped single car, passing single car, stopped single car, passing single car, stopped following car, passing Follower car, stopped follower cart, passing follower cart, such as figure 2 As shown, and est...
Embodiment 2
[0162] Embodiment 2, based on Embodiment 1, verifies the trajectory prediction method.
[0163] Select three intersections along the Cao'an Highway in Shanghai: Cao'an Highway-Jiasong North Road, Cao'an Highway-Xiangjiang Highway, and Cao'an Highway-Caofeng Road as representatives of suburban road signal control intersections; choose Siping Road-Dalian Road as urban roads Representatives of signal-controlled intersections used video recording to collect original video data during the off-peak hours (9:00-16:00) on 16 clear working days from June to October 2013. Use the trajectory extraction software to extract the trajectory of the bicycle and the trajectory of the vehicle following the 2s before the green flash to pass the stop line or stop before the stop line, including large vehicles and small vehicles. The accuracy of the trajectory is 0.12s, and the position error does not exceed 0.05m. For the two types of driving behaviors of single car and following car, the traject...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More