

Pneumatic upper limb rehabilitation robot
A rehabilitation robot and upper limb technology, applied in passive exercise equipment, physical therapy, etc., can solve the problems affecting the driving characteristics and motion characteristics of the robot, reaction force injury, complex mechanism, etc., to achieve obvious flexibility and safety while taking quality into account , Overcoming the effect of layout limitations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. All other embodiments obtained by persons of ordinary skill in the art based on the embodiments of the present invention belong to the protection scope of the present invention.
[0033] In order to facilitate the understanding of the above-mentioned technical solution of the present invention, the above-mentioned technical solution of the present invention will be described in detail below through a specific usage mode.
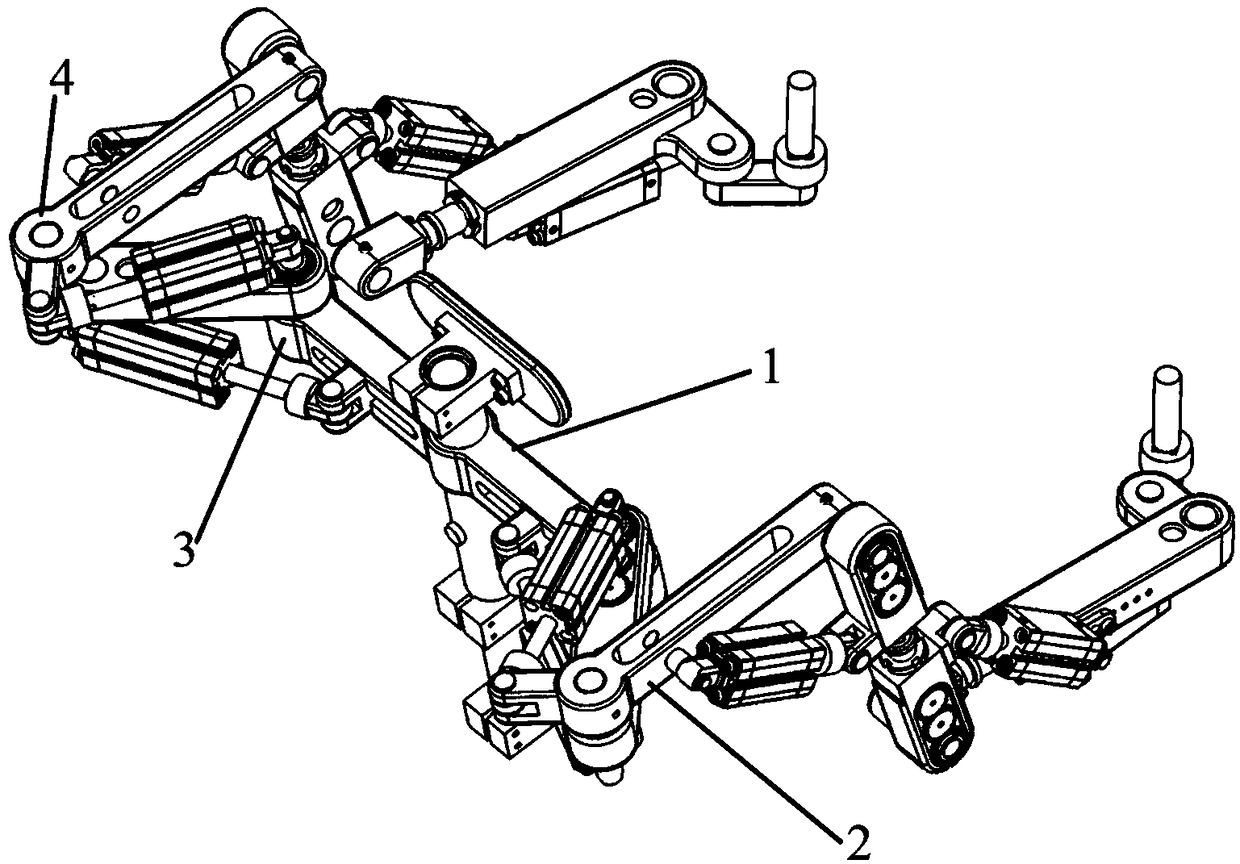
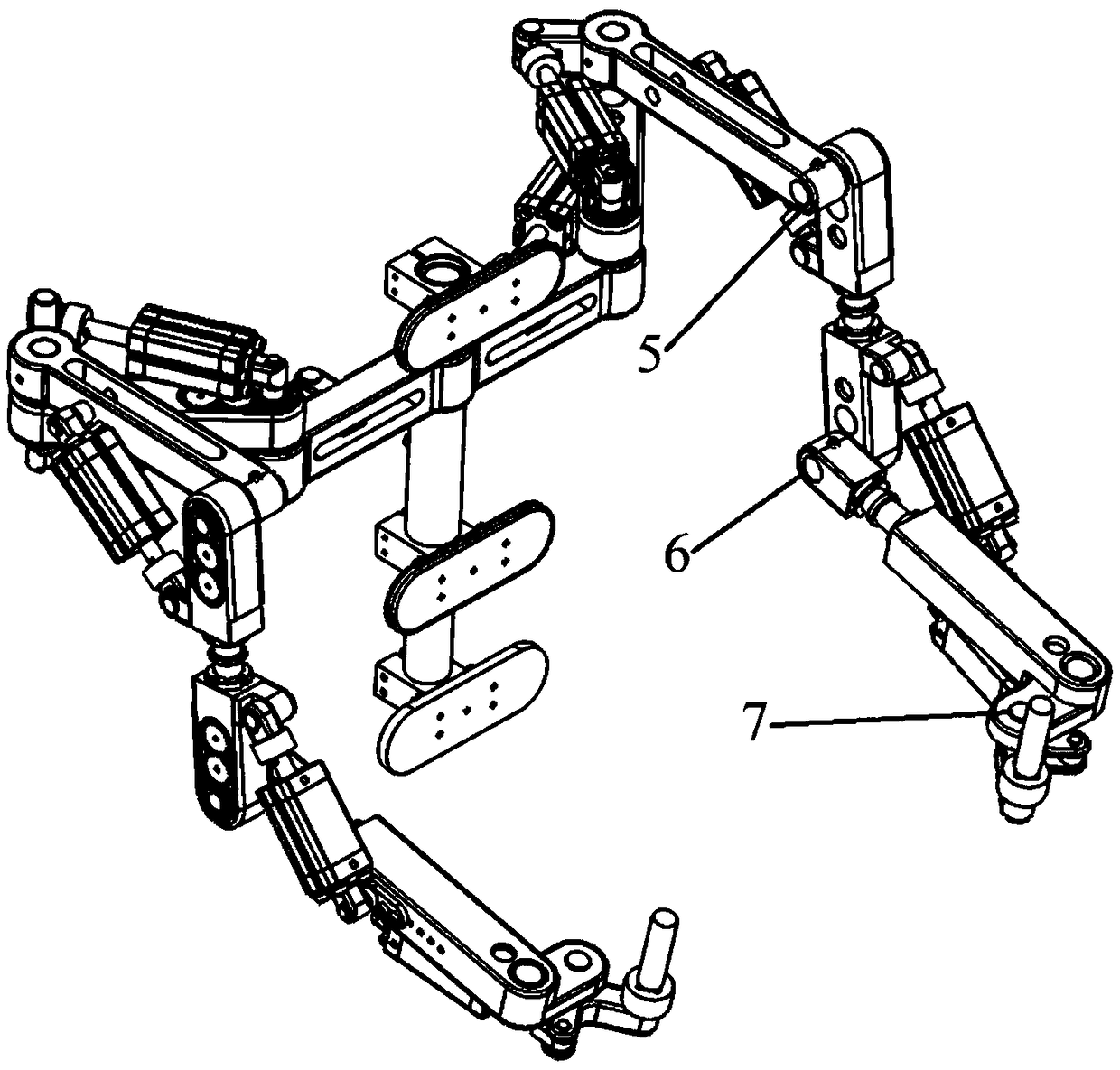
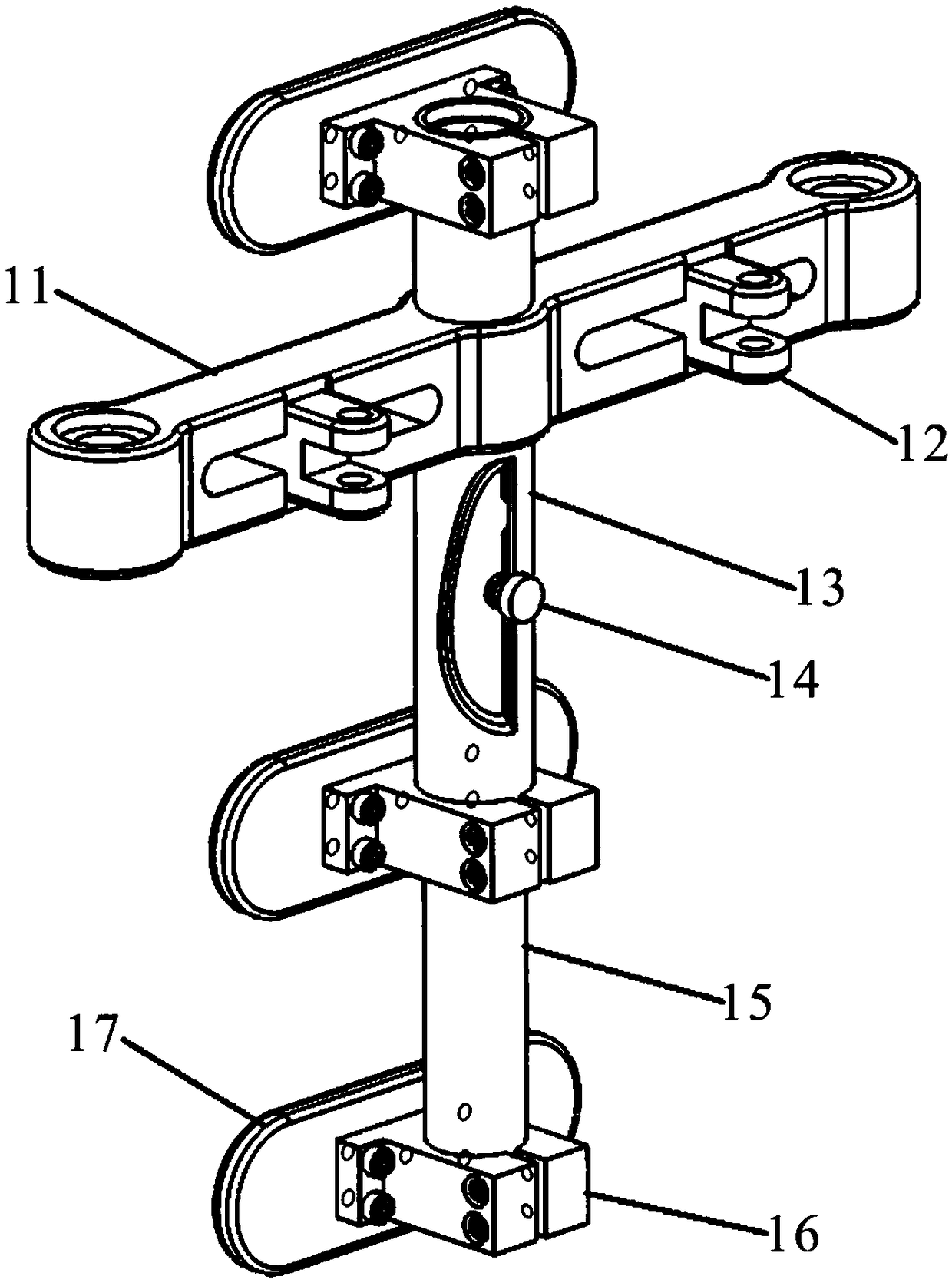
[0034] Such as Figure 1 to Figure 3 As shown, in specific use, a bilateral ten-degree-of-freedom pneumatic upper limb rehabilitation robot includes a back bracket 1 and an upper limb training device 2, two upper limb training devices 2 are symmetric...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More