

Linear active-disturbance-rejection control method and device for electro-hydraulic position servo control system
An electro-hydraulic position servo and linear active disturbance rejection technology, which is applied in general control systems, control/regulation systems, adaptive control, etc., can solve the problems of difficult to achieve high-performance control, reduce system stability margin, and control action lag. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
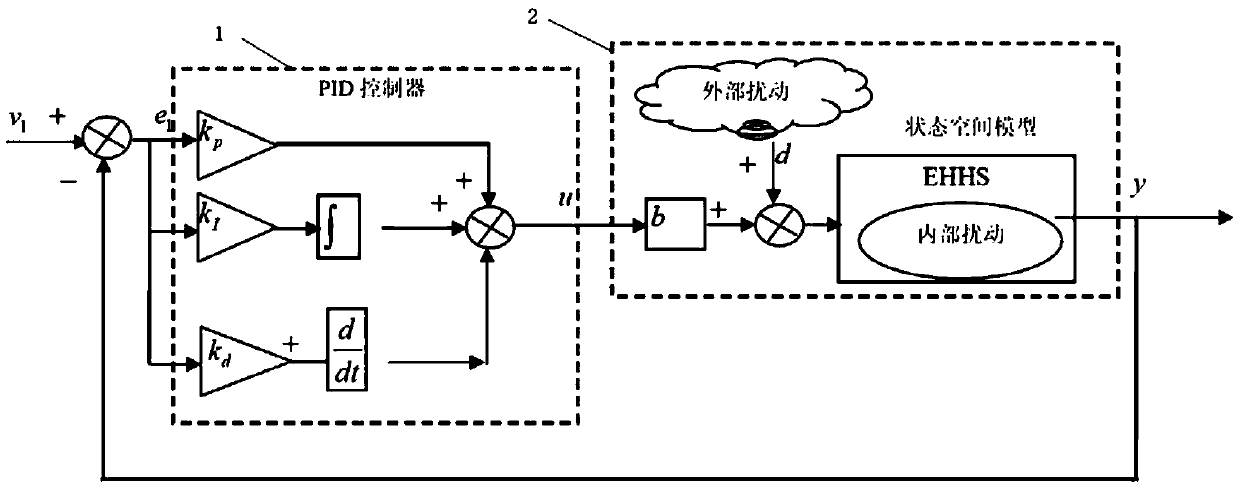
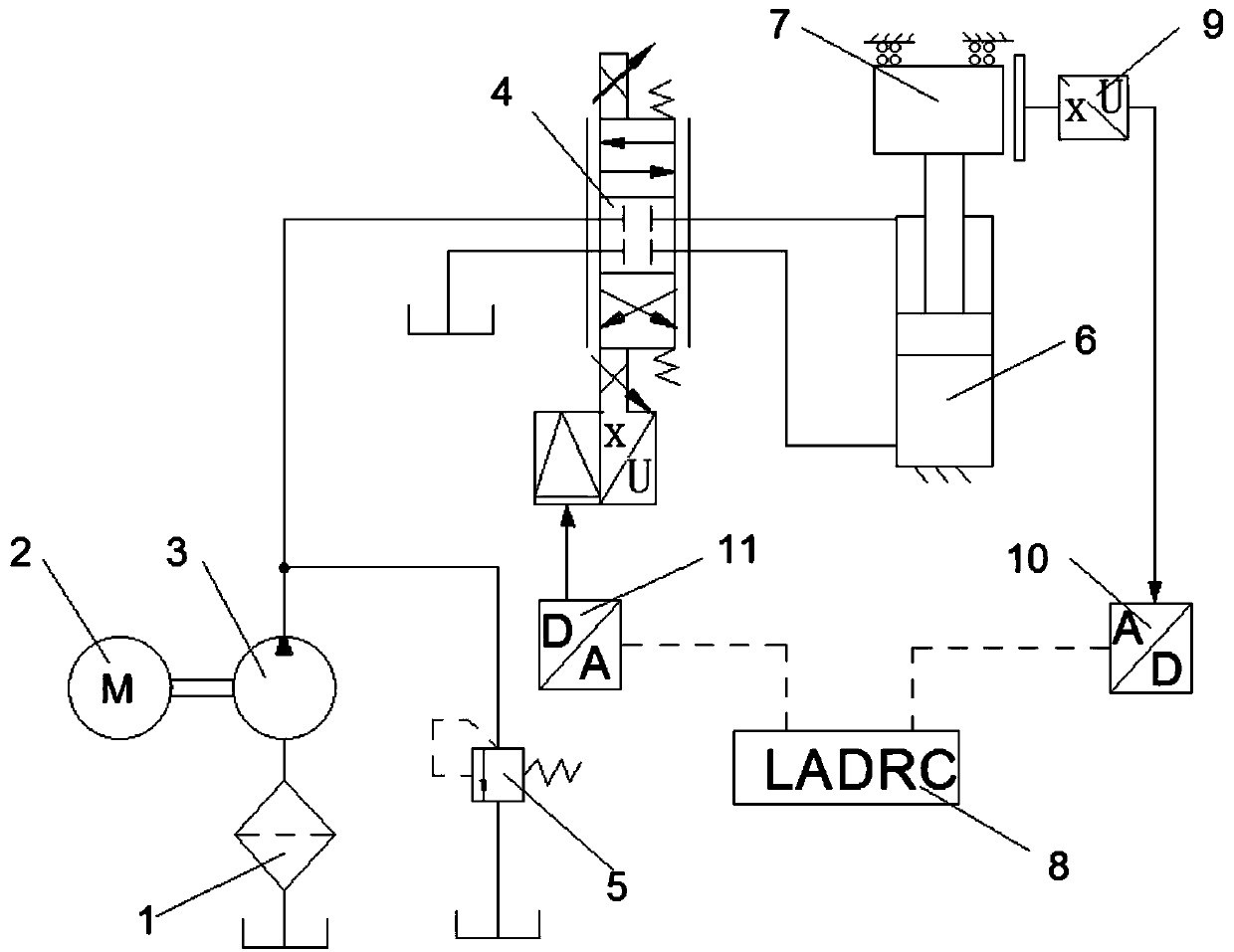
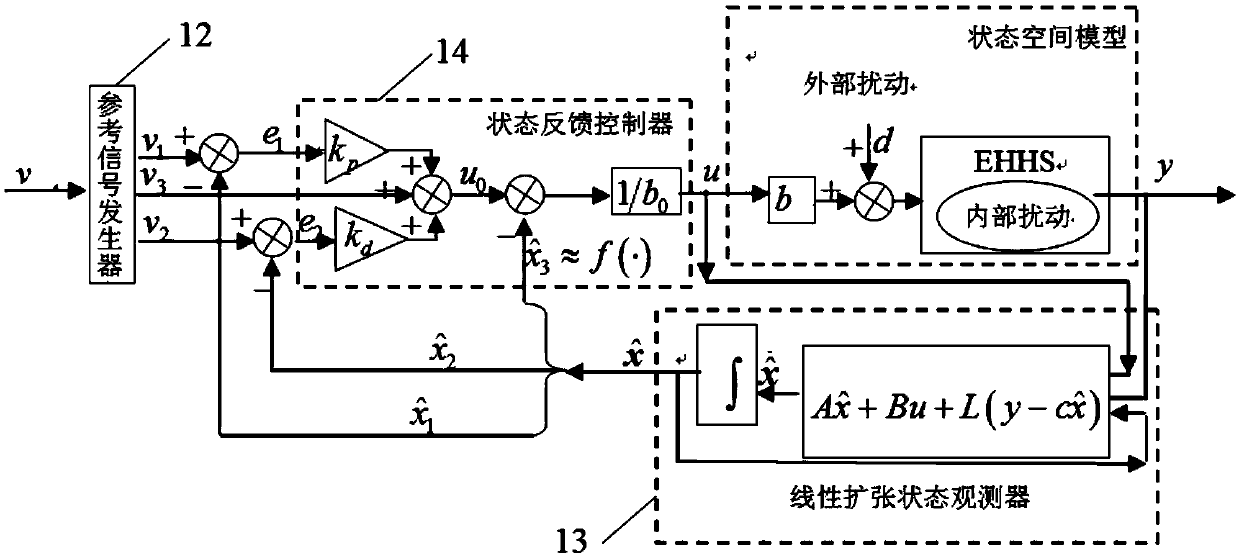
[0067] see figure 2 and image 3 , this embodiment provides a linear active disturbance rejection control method for an electro-hydraulic position servo control system. The electro-hydraulic position servo control system includes a proportional valve 4 and a hydraulic cylinder 6 . The proportional valve 4 controls the displacement of the piston of the hydraulic cylinder 6 according to the dynamic active compensation control law. The active compensation control law u is used for data processing, and the desired state feedback control law u′ is obtained, and u′ realizes the closed-loop negative feedback control of the electro-hydraulic position servo control system.
[0068] The linear active disturbance rejection control method in this embodiment includes the following steps.
[0069] (1) According to the mathematical model of the electro-hydraulic position servo system, the following state space equation of the linear extended state observer (LinearExtended State Observer, L...
Embodiment 2
[0093] This embodiment discloses a linear active disturbance rejection control method for an electro-hydraulic position servo control system, and the electro-hydraulic position servo control system includes a proportional valve, a hydraulic cylinder, and a controller.
[0094] The controller outputs a dynamic active compensation control law to the proportional valve, and the proportional valve controls the piston displacement of the hydraulic cylinder according to the dynamic active compensation control law. The linear active disturbance rejection control method performs data processing according to the current piston displacement y of the hydraulic cylinder and the current dynamic active compensation control law u output by the controller, and obtains the expected dynamic active compensation control law u' output by the controller, and u' realizes The closed-loop negative feedback control of the electro-hydraulic position servo system, the linear active disturbance rejection c...
Embodiment 3
[0120] see figure 2 and image 3 This embodiment provides a valve-controlled asymmetric cylinder electro-hydraulic position servo control system. The control system utilizes the linear active disturbance rejection control method of the electro-hydraulic position servo control system described in Embodiment 1 to achieve precision High performance, good stability and strong anti-interference ability.
[0121] A valve-controlled asymmetric cylinder electro-hydraulic position servo control system, which includes: a filter 1, a motor 2, a hydraulic pump 3, a proportional valve 4, an overflow valve 5, a hydraulic cylinder 6, a load 7, a displacement sensor 9, a linear automatic Anti-disturbance controller 8 , analog-to-digital converter 10 and digital-to-analog converter 11 .
[0122] The filter 1 is used to filter the hydraulic oil, and the oil inlet end of the hydraulic pump 3 communicates with the oil outlet end of the filter 1 . The motor 2 is connected with the hydraulic pu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More