

Design method for linear active-disturbance-rejection controller based on prediction tracking differentiator
A technology of tracking differentiator and linear ADRR, which is applied in the direction of adaptive control, general control system, control/regulation system, etc. It can solve the problem of weakening the anti-interference ability of ADRC controller, sacrificing ESO convergence speed and estimation ability, etc. problem, to achieve the effect of suppressing high-frequency noise pollution, reducing the problem of noise pollution amplification, and suppressing the phase delay phenomenon
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
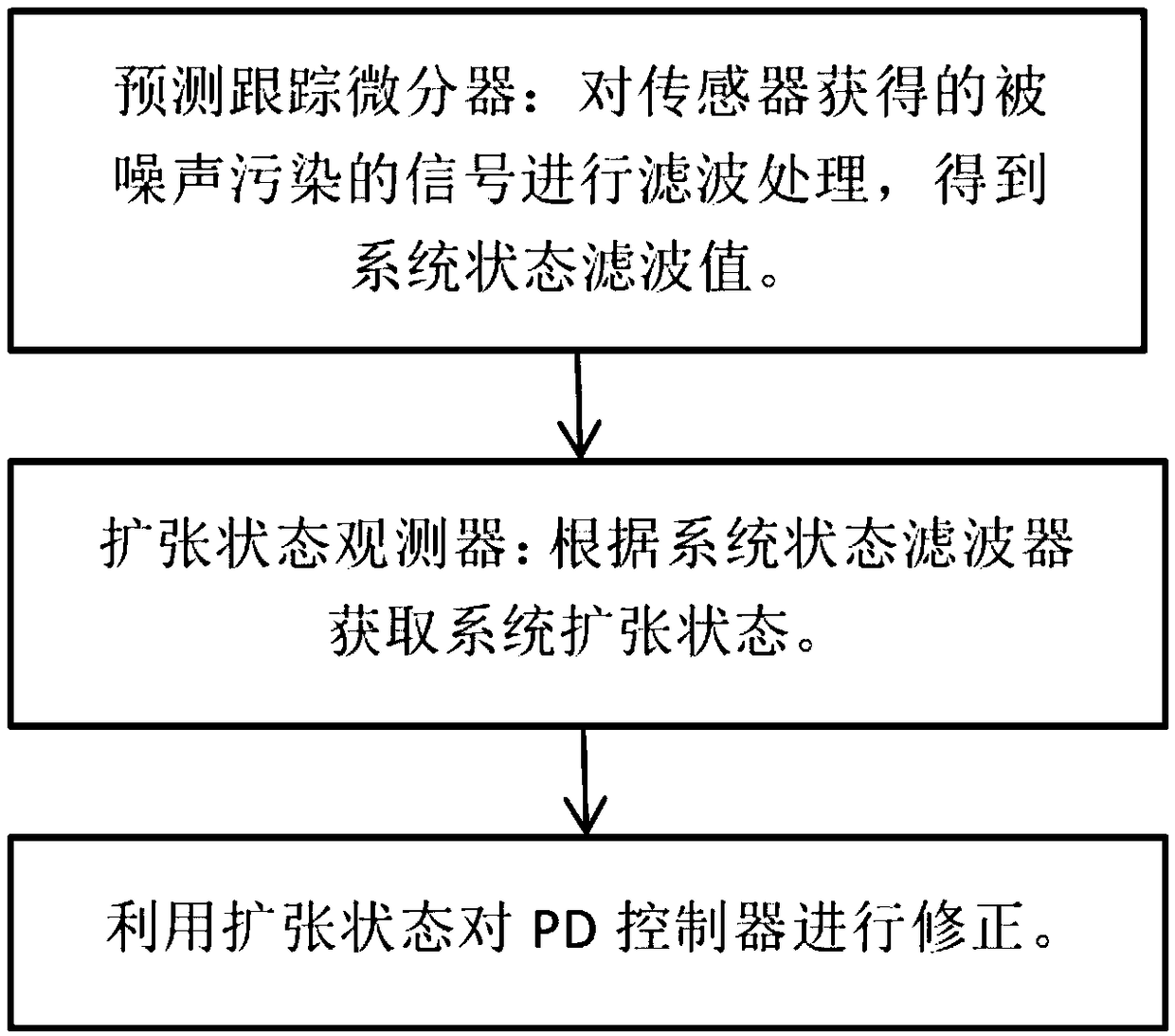
[0058] According to an embodiment of the present invention, the PD control law is corrected using the obtained expansion state. In this embodiment, the PD control law is designed according to the following formula:
[0059] u PD =k P (r-x 1 )+k D x 2 ;
[0060] Then use the obtained expansion state to correct the PD control signal, and the correction formula is as follows:
[0061]
[0062] Among them, z 2 Obtained by the above steps, b0 is a known parameter of the system.
[0063] So far, the improved linear active disturbance rejection controller based on predictive tracking differentiator can be obtained.
[0064] According to the design method of the linear active disturbance rejection controller based on the predictive tracking differentiator of the present invention, the influence of noise pollution on the closed-loop characteristics of the system can be suppressed, and the phase delay phenomenon caused by filtering can be effectively suppressed, and the effec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More