A Compensation Method for Zero Point Error of Driven Joints of Five Degrees of Freedom Hybrid Robot
A zero-point error and compensation method technology, which is applied in the field of rapid compensation of zero-point error of drive joints of five-degree-of-freedom hybrid processing robots, can solve problems such as numerous parameters to be identified, inaccurate identification, and complex identification models, and achieve a simple and efficient calibration process , fewer parameters to be identified, and a simpler identification model
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
[0056] This embodiment is aimed at a fast compensation method for the zero-point error of the driving joint of a five-degree-of-freedom hybrid robot with a rotating bracket disclosed in Chinese patent publication No. CN104985596A.
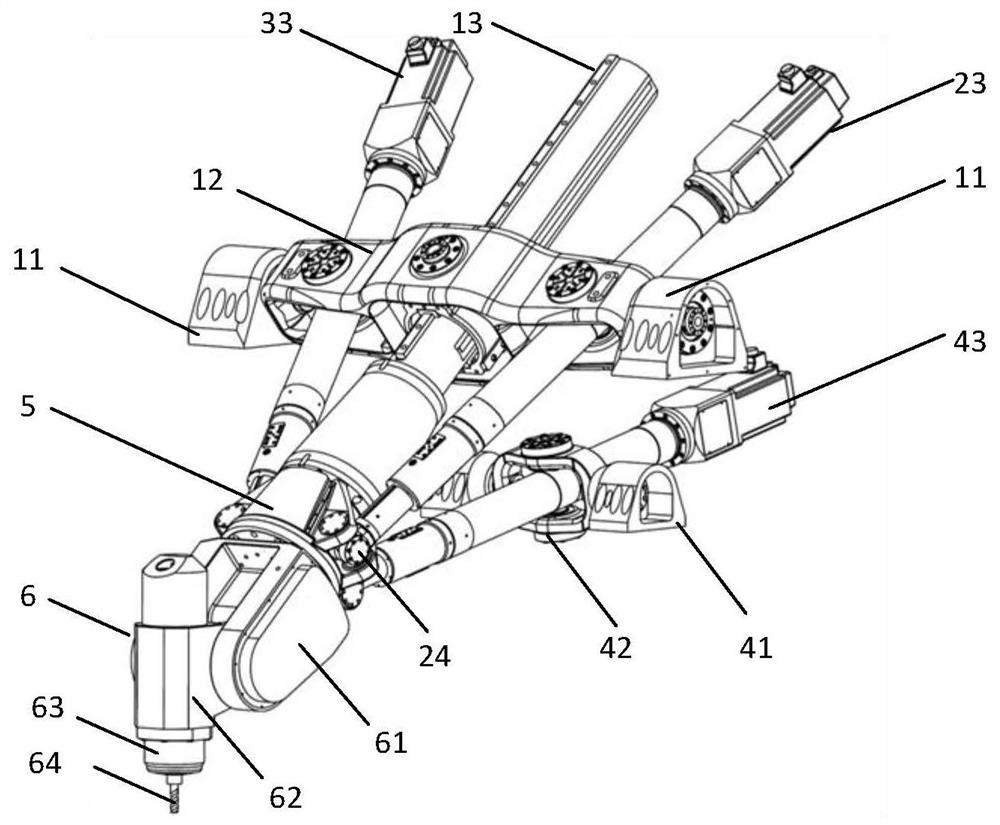
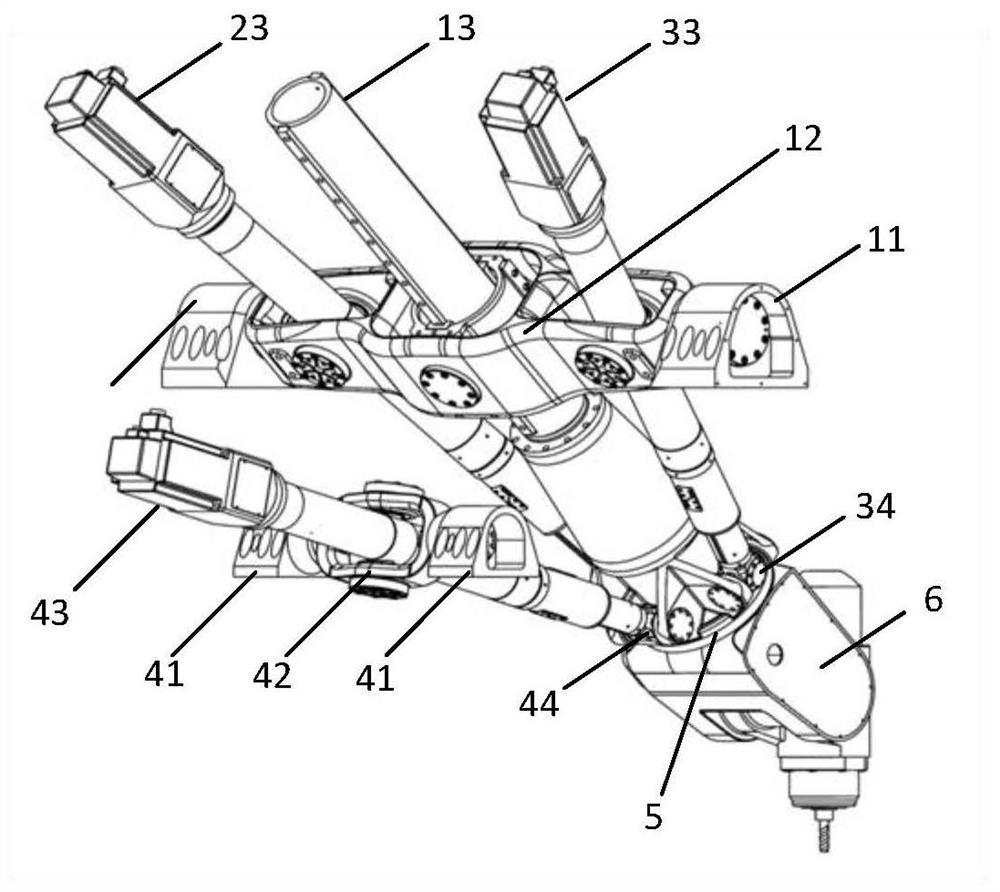
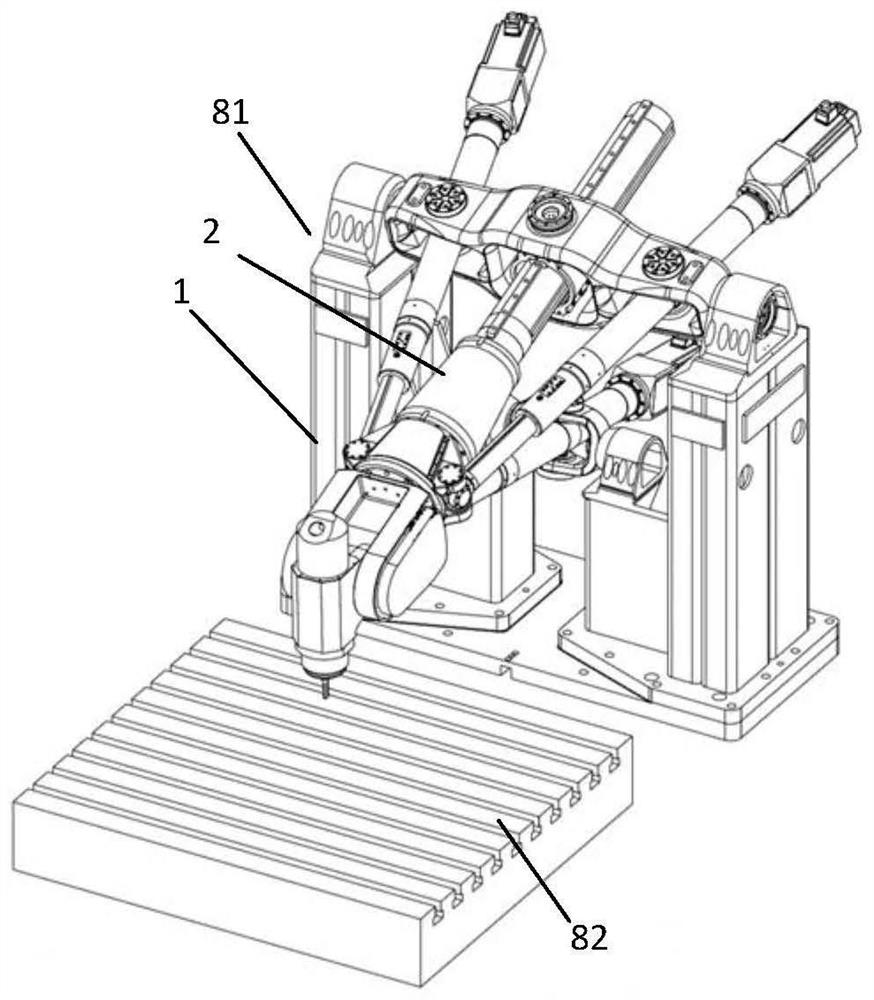
[0057] Attached below figure 1 And attached figure 2 The structure of the five-degree-of-freedom hybrid configuration equipment disclosed in CN104985596A is briefly described. The five-degree-of-freedom hybrid robot 1 is composed of a three-degree-of-freedom parallel mechanism with one translation and two rotations and a series-connected rotor with two rotational degrees of freedom connected in series, and the series-connected rotor 6 is fixedly connected to the parallel mechanism moving platform. The tandem rotary head 6 connected in series at the end of the moving platform 5 is a two-degree-of-freedom A / C sw...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com