

Non-cooperative target relative navigation motion estimation method based on sequence image
A non-cooperative target and relative navigation technology, applied in the field of spacecraft relative navigation, can solve the problems of dependence on observation accuracy, small amount of calculation, and high processing difficulty
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The present invention will be further described below in conjunction with the accompanying drawings.
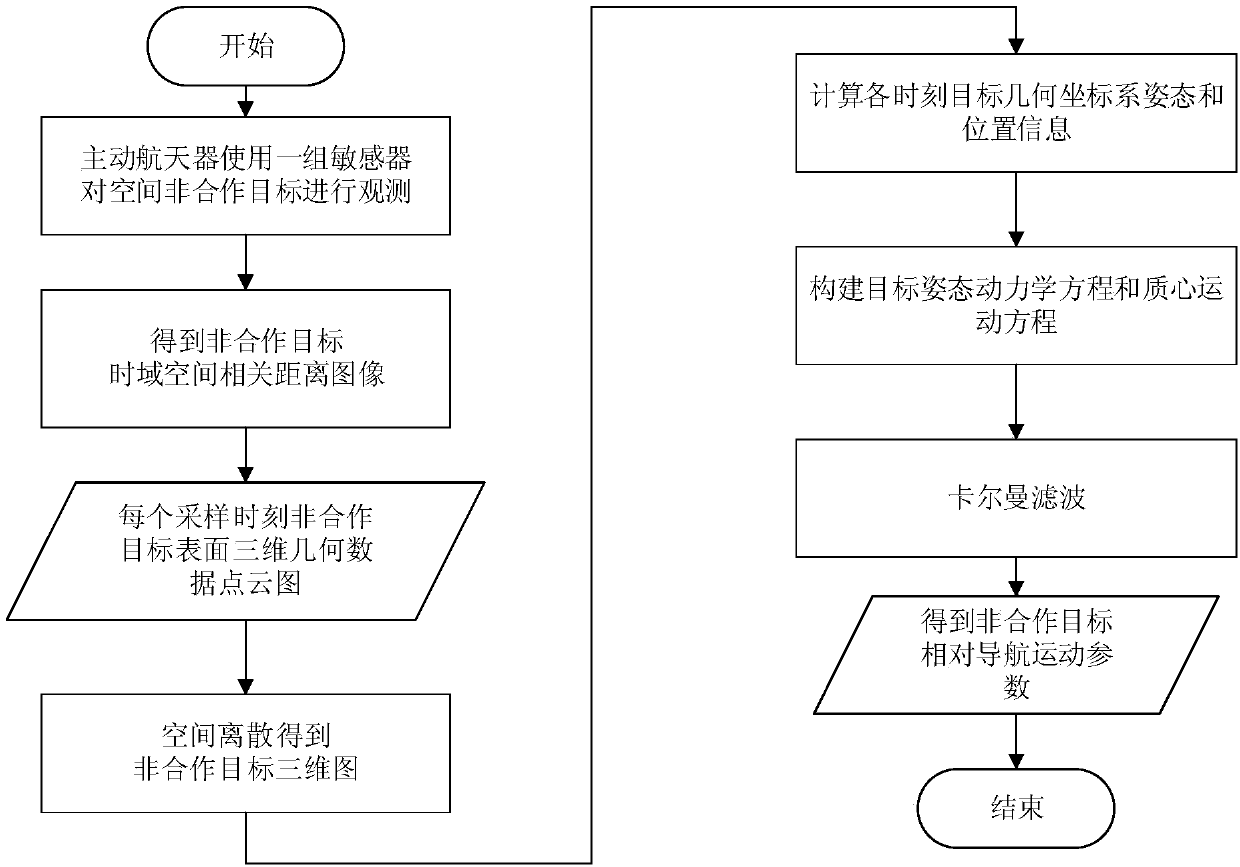
[0047] The embodiment of the present invention uses laser ranging radar to obtain a series of distance images of non-cooperative targets in space, and uses them as input data to obtain relative navigation motion parameters of non-cooperative targets relative to active spacecraft. Such as figure 1 As shown, the non-cooperative target relative navigation motion estimation method based on sequence images includes the following steps:
[0048] Step 1: Establish a reference coordinate system OXYZ on the active spacecraft; use the laser ranging sensor on the active spacecraft to observe the space non-cooperative target, and the number of sensors is k. In the observation time period, the total number of sensor observation sampling is p times, and the sampling time is the tth time s measured every second.
[0049] t s =s T (1)
[0050] Wherein, s=0,1,2,...p, T is the samp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More