

Unmanned aerial vehicle indoor positioning system and method with obstacle avoidance function
An indoor positioning and drone technology, applied in control/adjustment systems, three-dimensional position/channel control, vehicle position/route/altitude control, etc., can solve the problem of being unsuitable for indoor flight, high cost, and lack of positional information to rely on features and other problems, to achieve the effect of precise flight control, high-precision and accurate positioning, and cost reduction.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
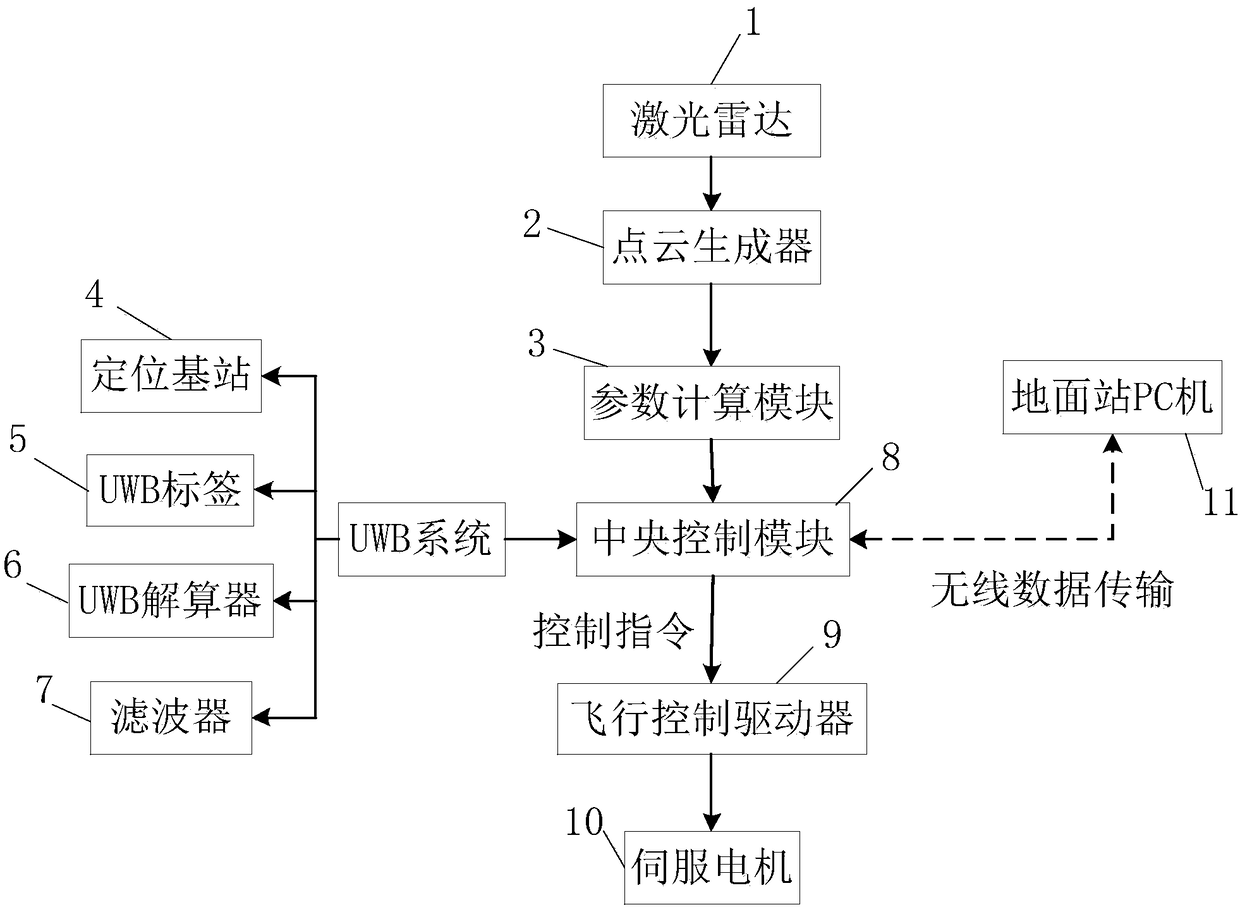
[0045] The UAV indoor positioning system with obstacle avoidance function described in the present invention, such as figure 1 As shown, it includes a laser radar 1 system, a UWB system, a central control module 8, a flight control driver 9, a servo motor 10, and a ground station PC 11; the laser radar 1 system and the UWB system are respectively connected to the central control module 8, and the central control module 8. The flight control driver 9 and the servo motor 10 are connected in sequence, and the ground station PC 11 is connected with the central control module 8 through a wireless communication module and performs data transmission for real-time monitoring of the unmanned aerial vehicle 12; the central control module 8 is used to receive Signals from the laser radar 1 system and the UWB system, and send control instructions to the flight control driver 9, and the flight control driver 9 sends a drive signal to the servo motor 10 to drive the drone to fly.
[0046] T...
Embodiment 2
[0049] The present invention also provides an indoor positioning method for unmanned aerial vehicle with obstacle avoidance function, which is characterized in that: comprising the following steps:
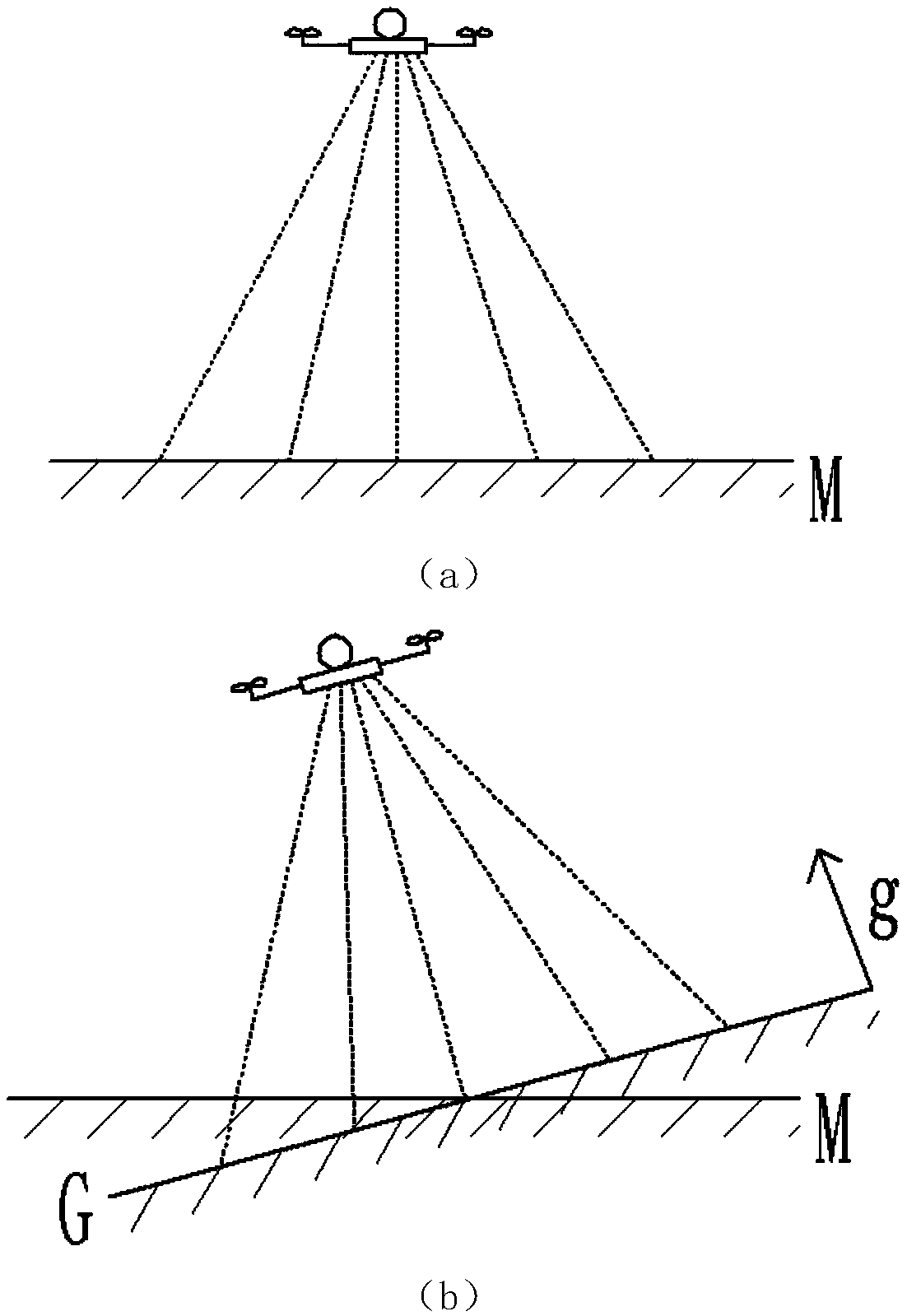
[0050] Step 1: Use the laser radar 1 installed on the UAV to collect indoor 3D point cloud images in real time according to the set acquisition frequency, and detect the plane of the 3D point cloud image and the distance between the plane and the location of the UAV to obtain the UAV The distance between the current position and the obstacle;
[0051] Step 2: Obtain the distance values from the UWB tag 5 on the drone to each positioning base station 4 in the room in real time;
[0052] Step 3: Correct the distance value obtained from the UWB tag 5 according to the correction function fitted by the actual measurement results;
[0053] Use a UWB tag 5, fix it in an open position, move the drone to a distance of 41m from the positioning base station, record the distance value Y1 o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More