

Group robot cooperation search method based on improved particle swarm algorithm
A technology for improving particle swarms and swarm robots, which is applied in the field of collaborative search of swarm robots based on improved particle swarm algorithm, which can solve the problems of easy omission in remote areas, low search efficiency of particle swarm algorithm, and concentrated exploration range.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0067] Specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
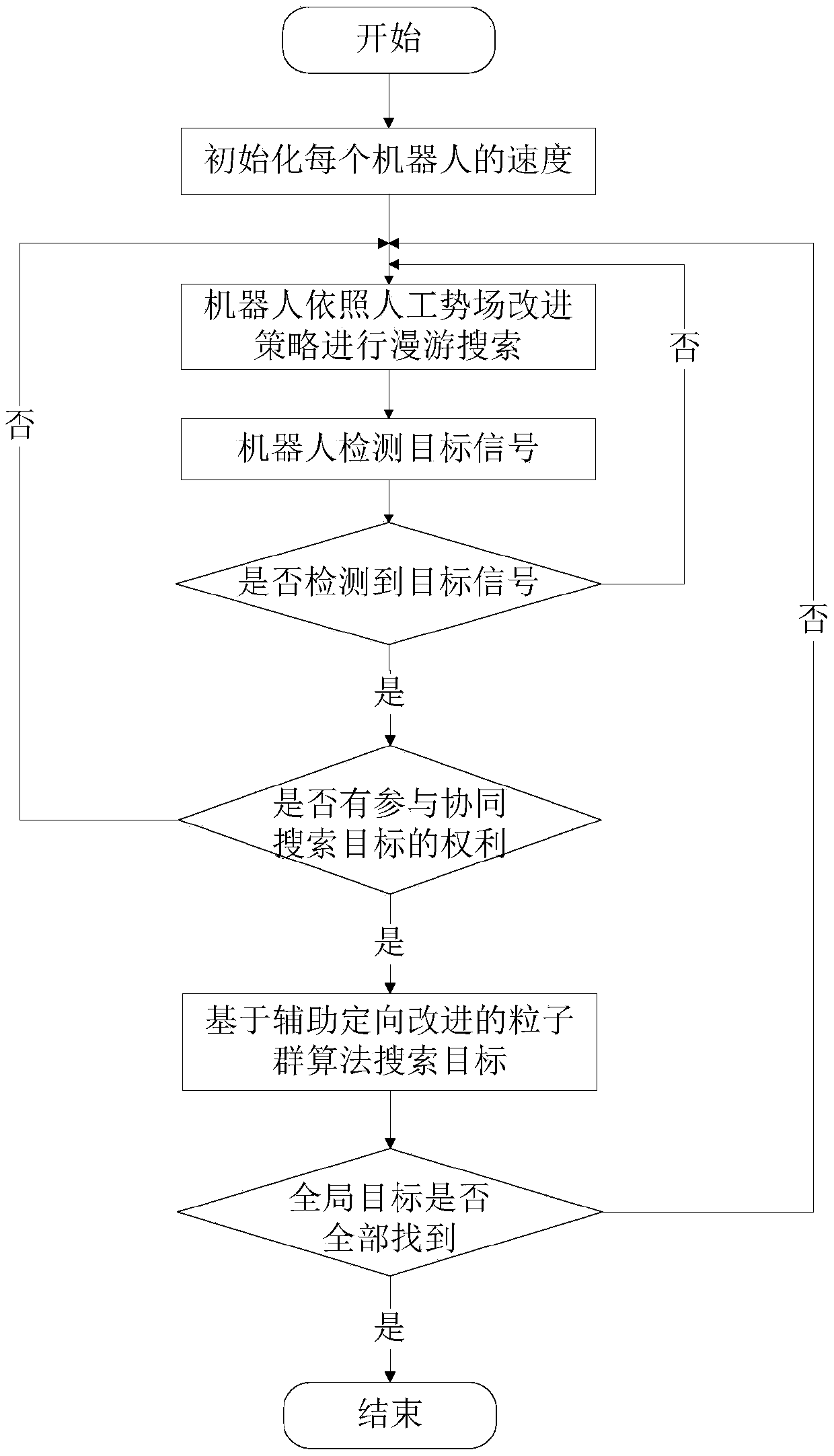
[0068] The present invention is a multi-robot cooperative target search method. Each robot performs a rough search through roaming search, and after sensing a target signal, forms a search alliance through local communication according to a probability threshold method. In the search alliance, the fine search for the target position is realized through the improved particle swarm optimization algorithm. Specifically include the following steps:
[0069] A. Robot system state initialization, such as robot characteristics, quantity, maximum speed, communication neighborhood radius, initial position area, environmental boundary, etc. The initial speed and initial position of the robot are randomly generated within the speed limit and position area. The robot's maximum detection radius for signals.
[0070] A1. Task model:
[0071] The robot s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More