

Clamping jaw function cell for truss rod grabbing
A gripper and truss technology, applied in the field of gripper functional cells, can solve problems such as poor speed stability, inadaptability to space environment tasks, and inability to guarantee positioning accuracy, and achieve the effect of convenient installation and disassembly
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
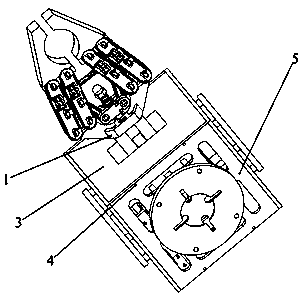
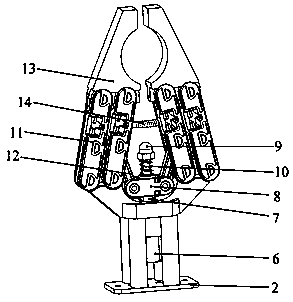
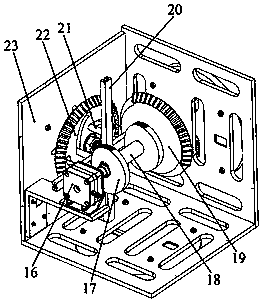
[0015] The specific structure and implementation mode of the present invention will be further described below in conjunction with the accompanying drawings.
[0016] The structural composition of the present invention is as figure 1 , figure 2 , image 3 with Figure 4 shown. The gripper function cell is composed of two parts, the grasping mechanism and the connecting mechanism. The grabbing mechanism consists of a stepper motor seat (1), a jaw mounting plate (2), a jaw cover plate (3), a set screw (4), a cover plate (5), a stepper motor (6), a nut wire Rod (7), telescopic nut seat (8), cap nut (9), jaw pressure spring (10), long arm (11), short arm (12), jaw (13), spring (14), Composed of trusses (15); the connecting mechanism consists of servo motors (16), cams (17), shafts (18), incomplete bevel gears (19), cross rails (20), rail assemblies (21), grooved bevel gears (22), support plate (23), connecting surface (24) is formed. The stepper motor seat (1), the jaw mou...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More