

IMU auxiliary tracking model for monocular vision inertial positioning
An inertial positioning and monocular vision technology, applied in the field of visual positioning, can solve the problems of tracking failure, poor positioning accuracy, inability to overcome the motion environment, etc., and achieve the effect of improving positioning accuracy and robustness, and improving robustness.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
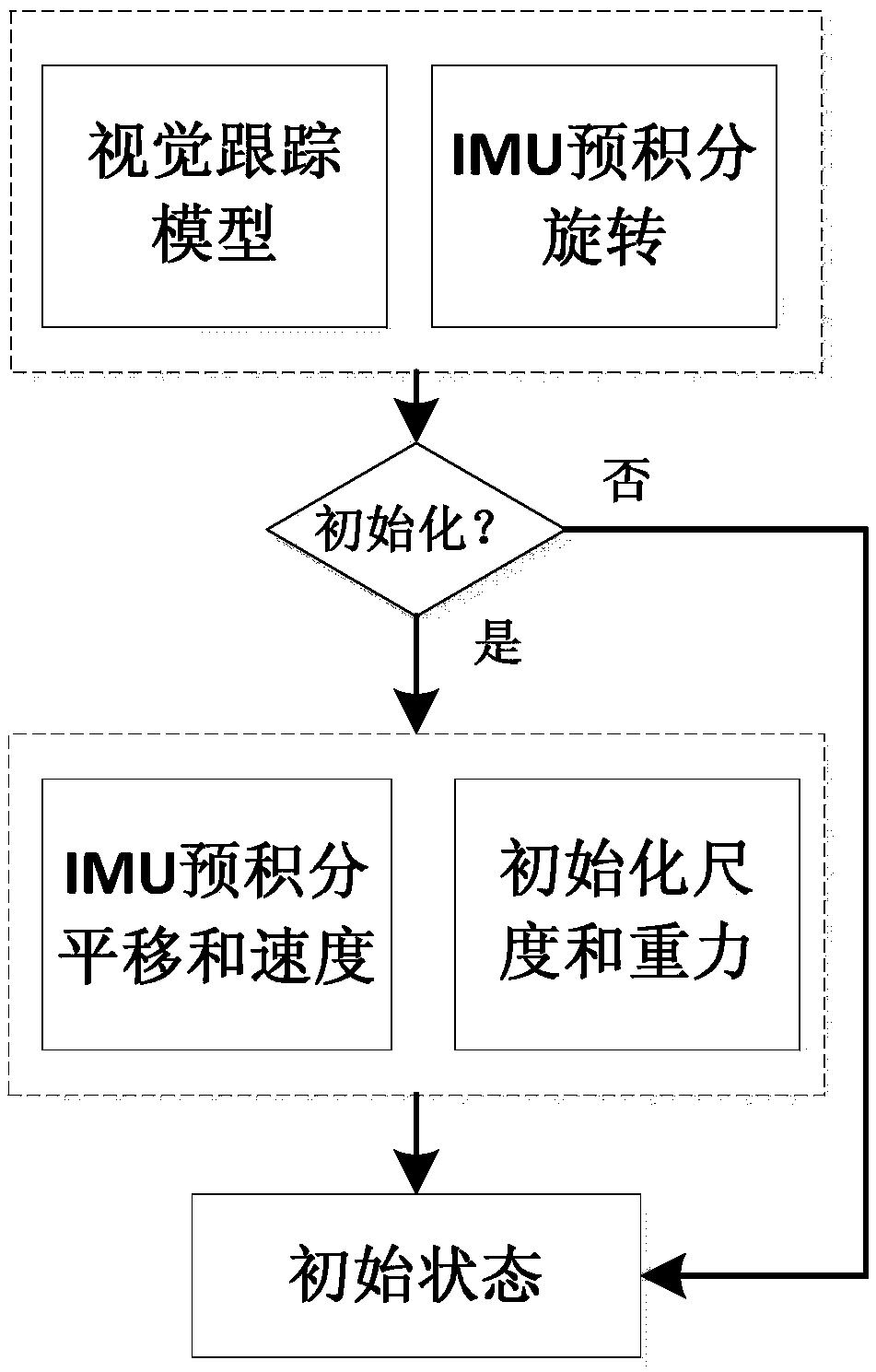
[0044] Such as figure 1As shown, an IMU-assisted tracking model for monocular visual inertial positioning includes: the initialization phase and the phase after the initialization is completed; in the initialization phase, on the basis of the initial translation of the current frame set by the uniform velocity model, the original data acquired by the IMU Do pre-integration, solve the IMU prior rotation, and obtain the initial pose of the current frame; after the initialization is completed, on the basis of providing the initial pose, add the prior velocity information of the IMU pre-integration, and establish from the initial state calculated above Track the model for precise positioning.
[0045] The IMU priori data solution is specifically: the IMU can output acceleration and angular velocity, and the relative rotation of the IMU unit can be obtained by integrating the angular velocity; formula (1) is the angular velocity and acceleration output by the IMU, B w WB (t) and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More