

A bolt positioning and posture detection method based on monocular and binocular vision cooperation
A bolt positioning and detection method technology, applied in the field of vision systems, can solve problems such as deformation and unreliable pose analysis, and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The working process of the system will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
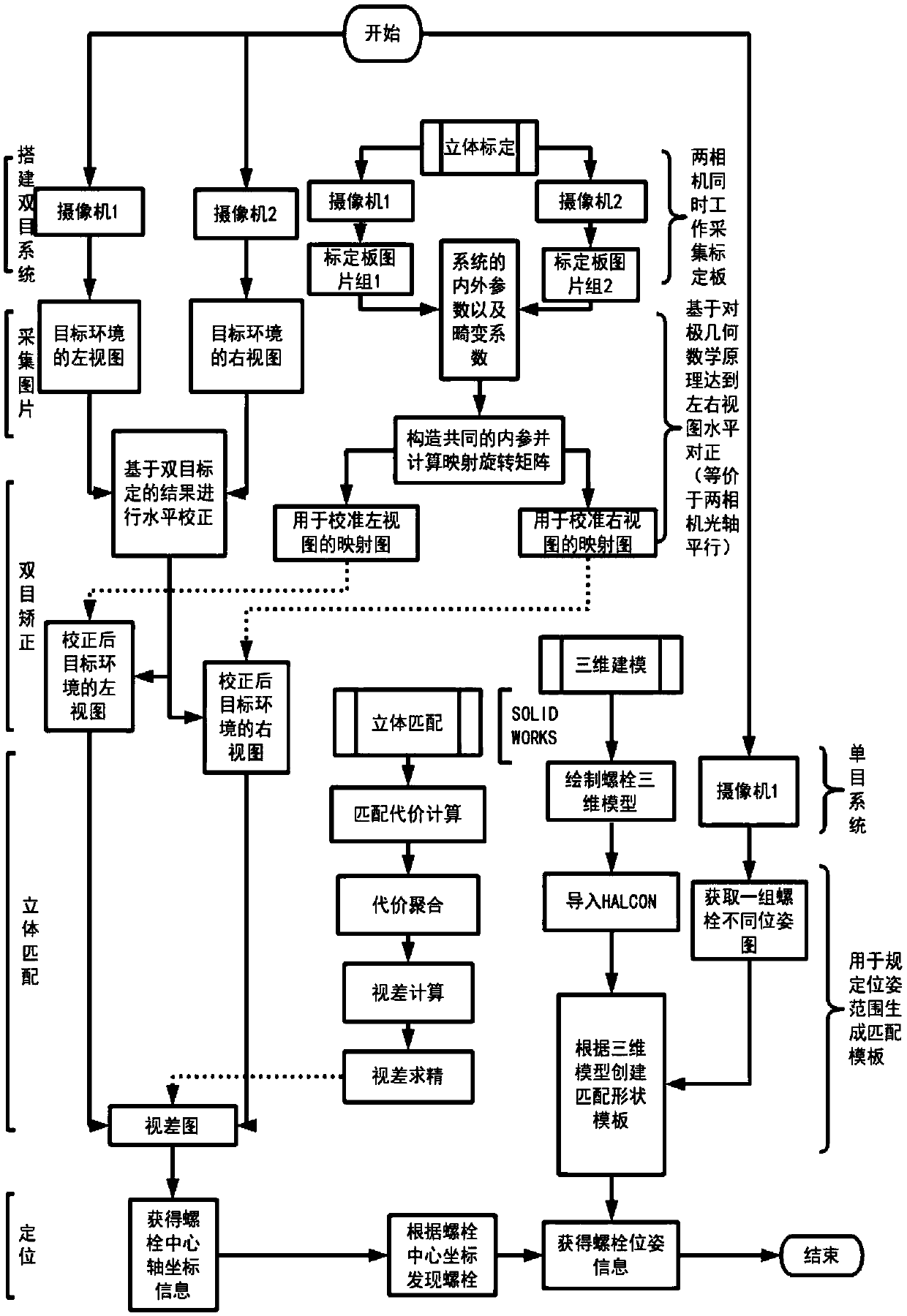
[0034] refer to figure 1 , the system workflow steps are as follows:
[0035] Step 1, calibrate the camera parameters of the binocular system on the HALCON platform, the steps are as follows:
[0036] Step 1.1, assume that the world coordinate system coincides with the camera coordinate system of the left camera.
[0037] Step 1.2, establish the relationship from world coordinate system to pixel coordinate transformation:
[0038]
[0039] Let the origin of the pixel coordinate system be the upper left vertex of the image, the horizontal axis (u-axis) and the vertical axis (v-axis) are parallel to the X-axis and Y-axis in the image coordinate system respectively, and have the same direction. Suppose the coordinates of the origin of the image coordinate system in the pixel coordinate system are (u 0 ,v 0 ); The coordinates ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More