

A method for calibrating a parabolic reflex camera using a straight line and a circular polar line
A catadioptric and camera technology, applied in the field of computer vision, can solve problems such as the degradation of parabolic catadioptric cameras, and achieve the effect of simple production
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
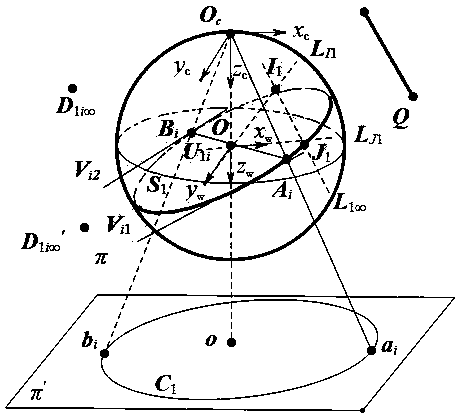
[0075] The invention proposes a method for linearly determining internal parameters of a parabolic catadioptric camera by using a straight line as a target. The experimental template structural schematic diagram that the present invention adopts is as figure 1 shown. The implementation of the present invention will be described in more detail with an example below.
[0076] The experimental template used in the calibration of parabolic catadioptric cameras based on a straight line in space is a straight line in space, such as figure 1 As shown, the straight line is denoted as Q. Utilize the method among the present invention to carry out calibration for the parabolic catadioptric camera that is used for experiment, concrete steps are as follows:
[0077] 1. Fitting target curve equation
[0078] The image size used in the present invention is 1800×1700. Three experimental images of the target were taken with a parabolic catadioptric camera, and the images were read in. Th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More