

Autonomic aerial refueling butt joint simulate visual navigation control system and method
A visual navigation and aerial refueling technology, applied in general control systems, control/adjustment systems, three-dimensional position/course control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
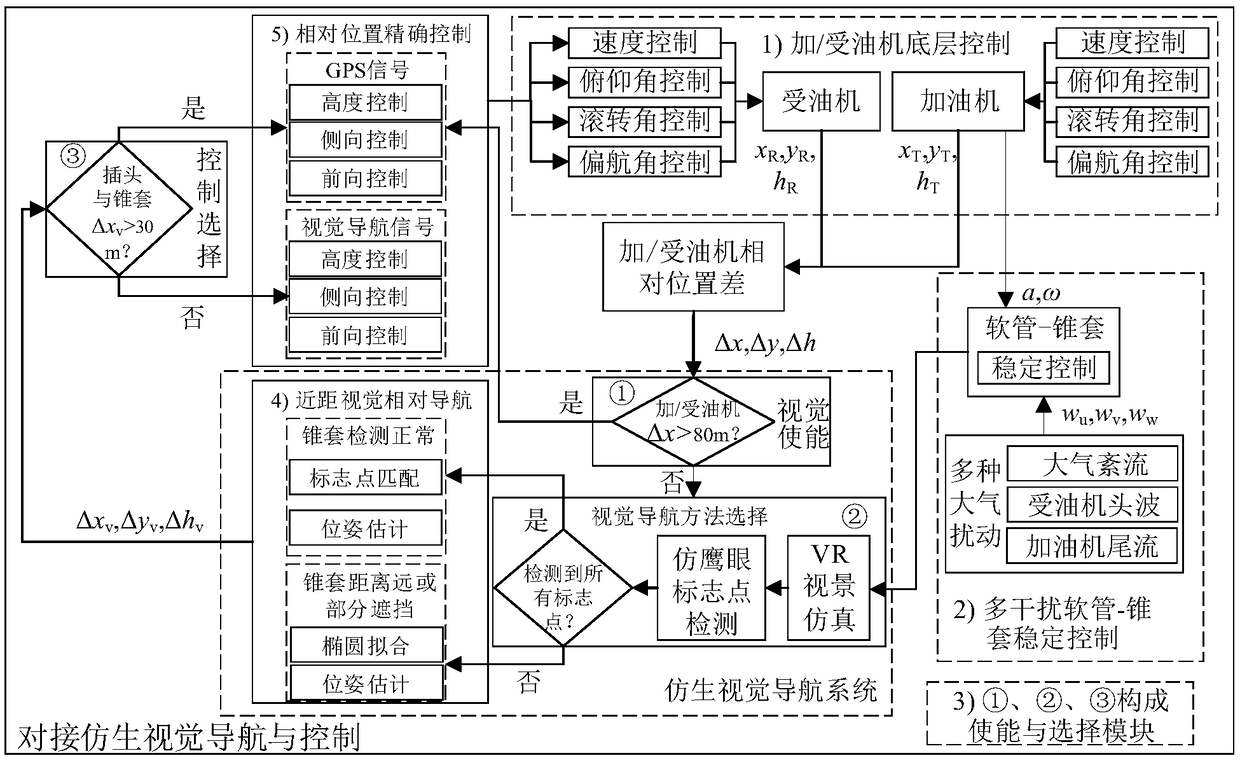
[0082] See Figure 1 to Figure 5 In the following, the effectiveness of the system and method proposed by the present invention will be verified through a specific example of autonomous aerial refueling and docking bionic vision navigation control. An autonomous aerial refueling docking bionic visual navigation control system and method, the system framework is as follows figure 1 As shown, the bionic visual navigation control system for autonomous aerial refueling and docking consists of five parts, namely: the bottom layer control module of the refueling / receiving machine, the multi-disturbance hose-drogue stability control module, the enabling and selection module, and the short-range vision relative module. Navigation module, precise relative position control module of oil receiver.
[0083] The implementation process of this method is as follows Figure 4 As shown, the specific steps are as follows:
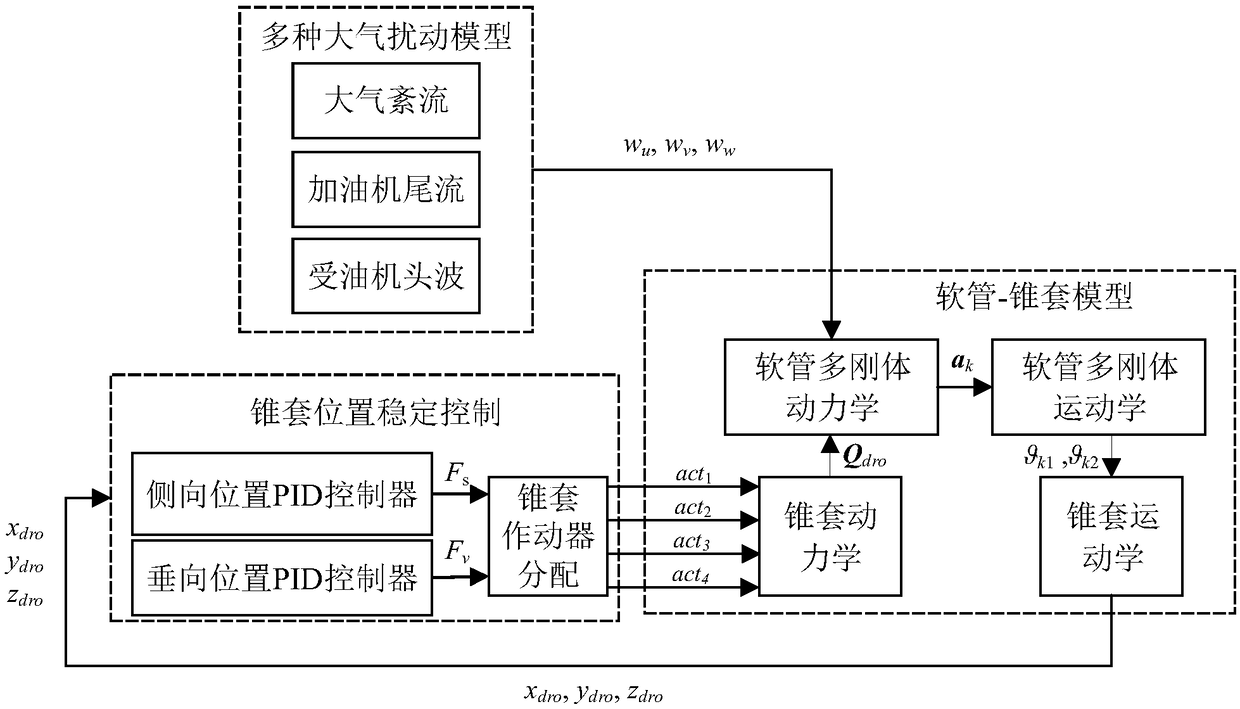
[0084] Step 1: Modeling of oil receiver, hose-drogue, and various wi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More