

Space multi-joint robot path planning method based on differential evolution particle swarm optimization
A multi-joint robot and particle swarm algorithm technology, which is applied to manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as poor repeatability, search stagnation, and premature convergence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
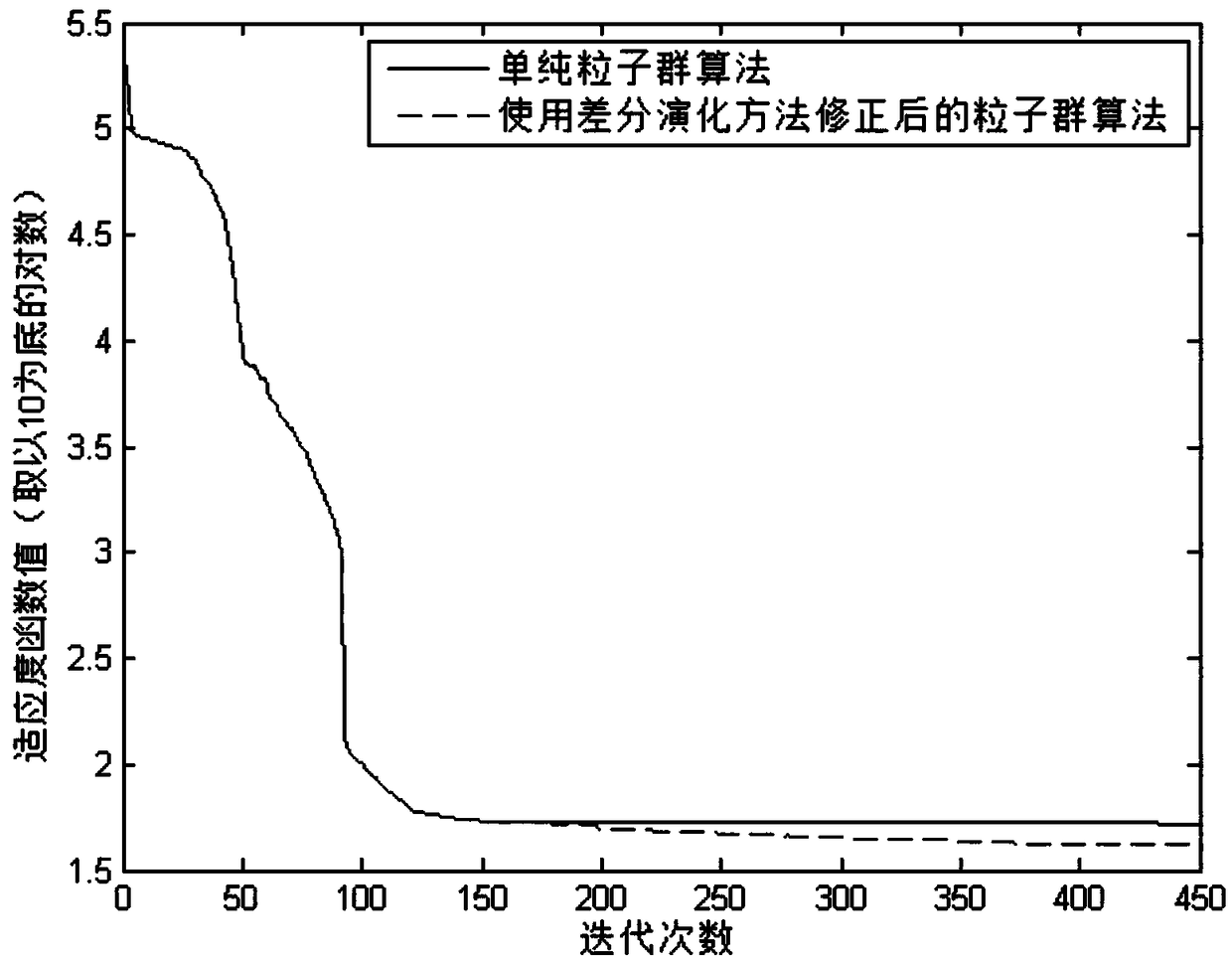
[0061] The present invention provides a path planning method for a space multi-joint robot based on differential evolution particle swarm algorithm. Firstly, the kinematics and dynamics model of the joint angle change of the mechanical arm is established, and then the model of the disturbance of the multi-joint robot collision to the base is established. Angle change track curve is expressed as a polynomial function about time t, and the total fitness function is established. In the iterative solution method, the particle swarm optimization algorithm is first used. When the method has a stagnation point, the differential evolution algorithm is started, and the Some individuals of the two algorithm populations are exchanged to expand the population size in disguise and improve the solution accuracy.
[0062] The present invention is based on a differential evolution particle swarm algorithm space multi-joint robot path planning method, comprising the following steps:
[0063] S...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More