

Three-freedom-degree space mechanical arm motion planning method based on learning generalization mechanism
A space manipulator and motion planning technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of complex planning and calculation, low intelligence, and difficulty in planning the movement of the manipulator, so as to achieve good environmental adaptability, The effect of improving the level of intelligence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
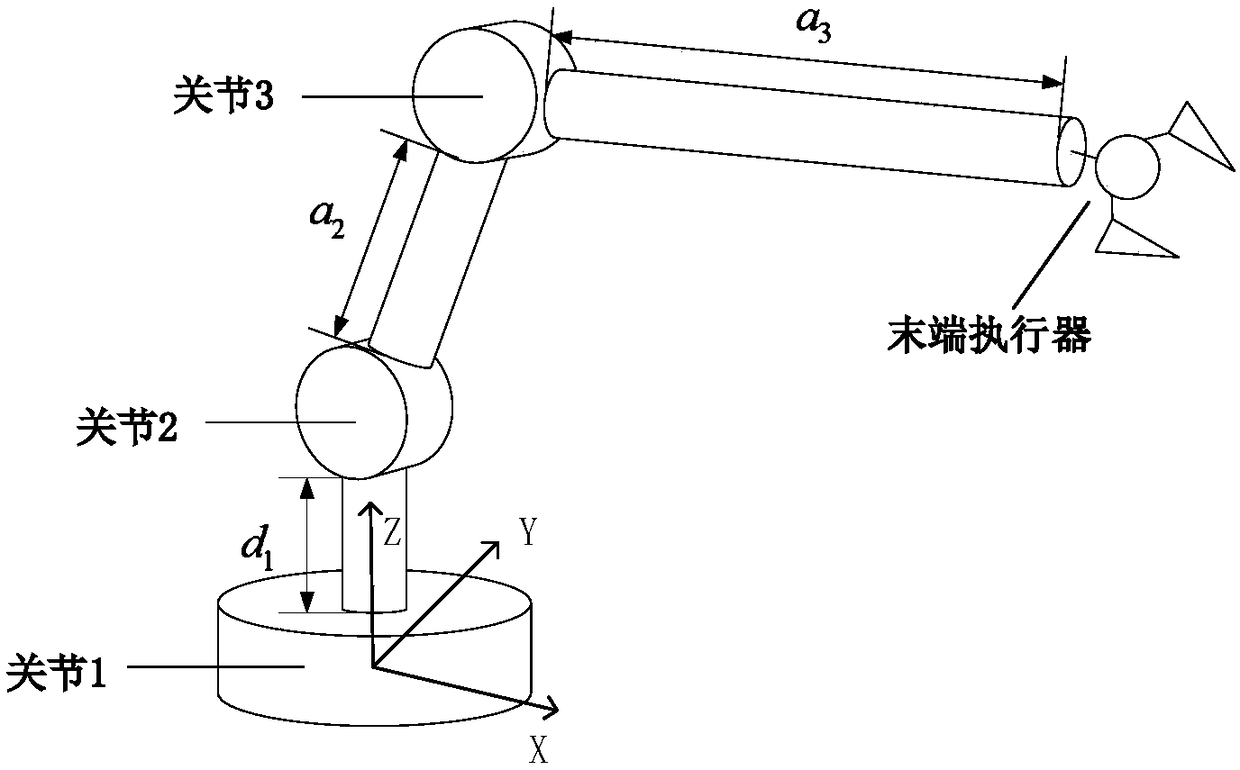
[0058] In order to further illustrate the technical scheme of the present invention, below in conjunction with attached table 1-2, appended Figure 1-12 A three-degree-of-freedom space manipulator motion planning method based on the learning generalization mechanism of the present invention is described in detail.
[0059] Step 1: According to the D-H modeling algorithm, establish figure 1 The D-H model parameters corresponding to the three-degree-of-freedom space manipulator 3D model shown in Table 1 are shown in the three-degree-of-freedom space manipulator D-H ((Denavit-Hartenberg, hereinafter referred to as D-H)) model parameter table, and its D-H parameters in the present invention are :D 1 = 0, a 2 =a 3 = 0.3, α 1 = π / 2, α 2 =-π;
[0060] Table 1
[0061]
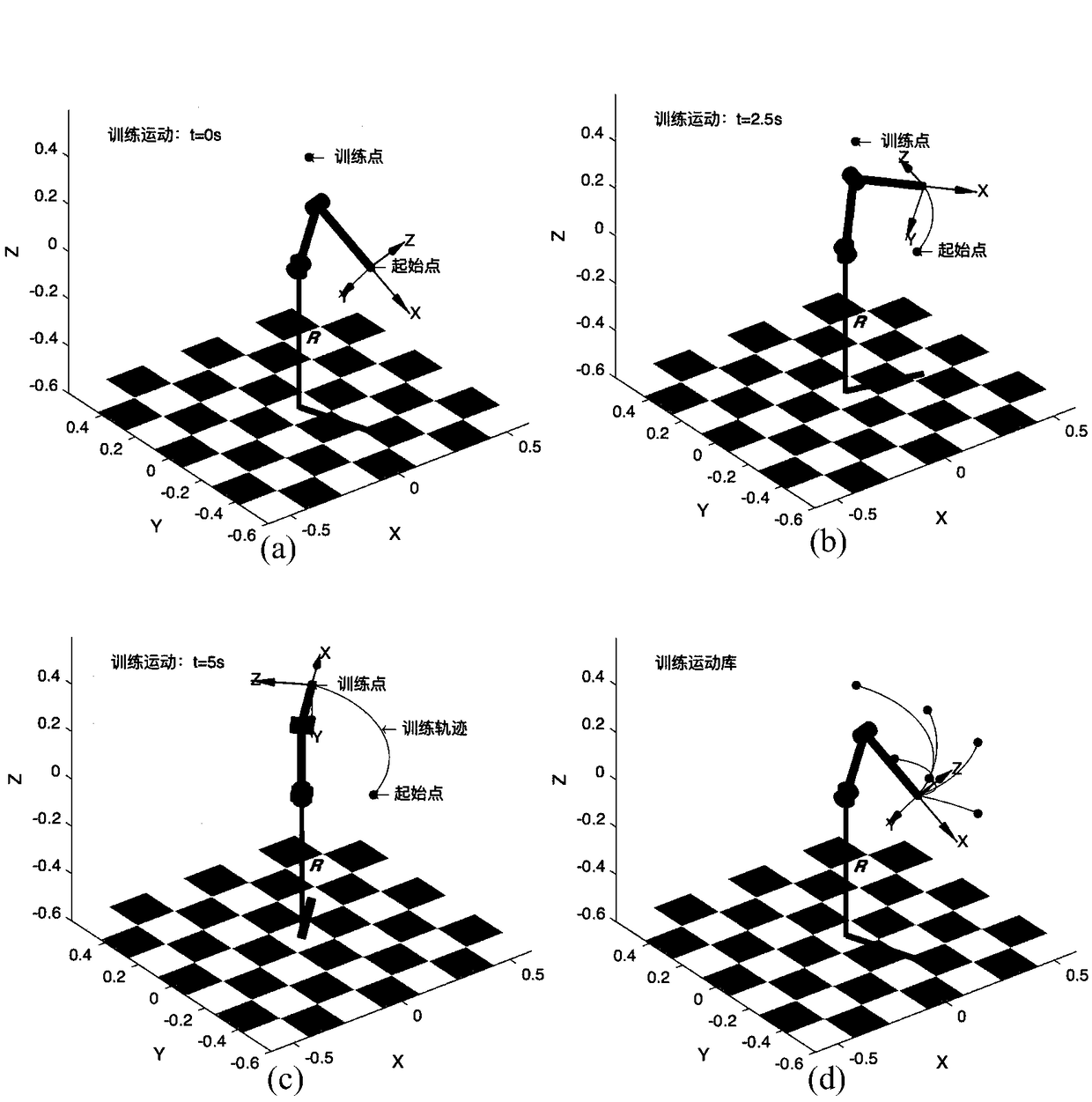
[0062] Step 2: Sample training process: such as figure 2 As shown in (a), 2(b), and 2(c), a spatial target point is preset as a training point, and the end of the robot arm is trained to move from the star...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More