Method for guiding robot to conduct automatic welding through CAD drawing technology
An automatic welding and robot technology, applied in welding equipment, arc welding equipment, manufacturing tools, etc., can solve problems such as forgetting, achieve shortened cycle, improve working conditions, and realize the effect of welding automation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The present invention is described in detail below with reference to accompanying drawing and embodiment:
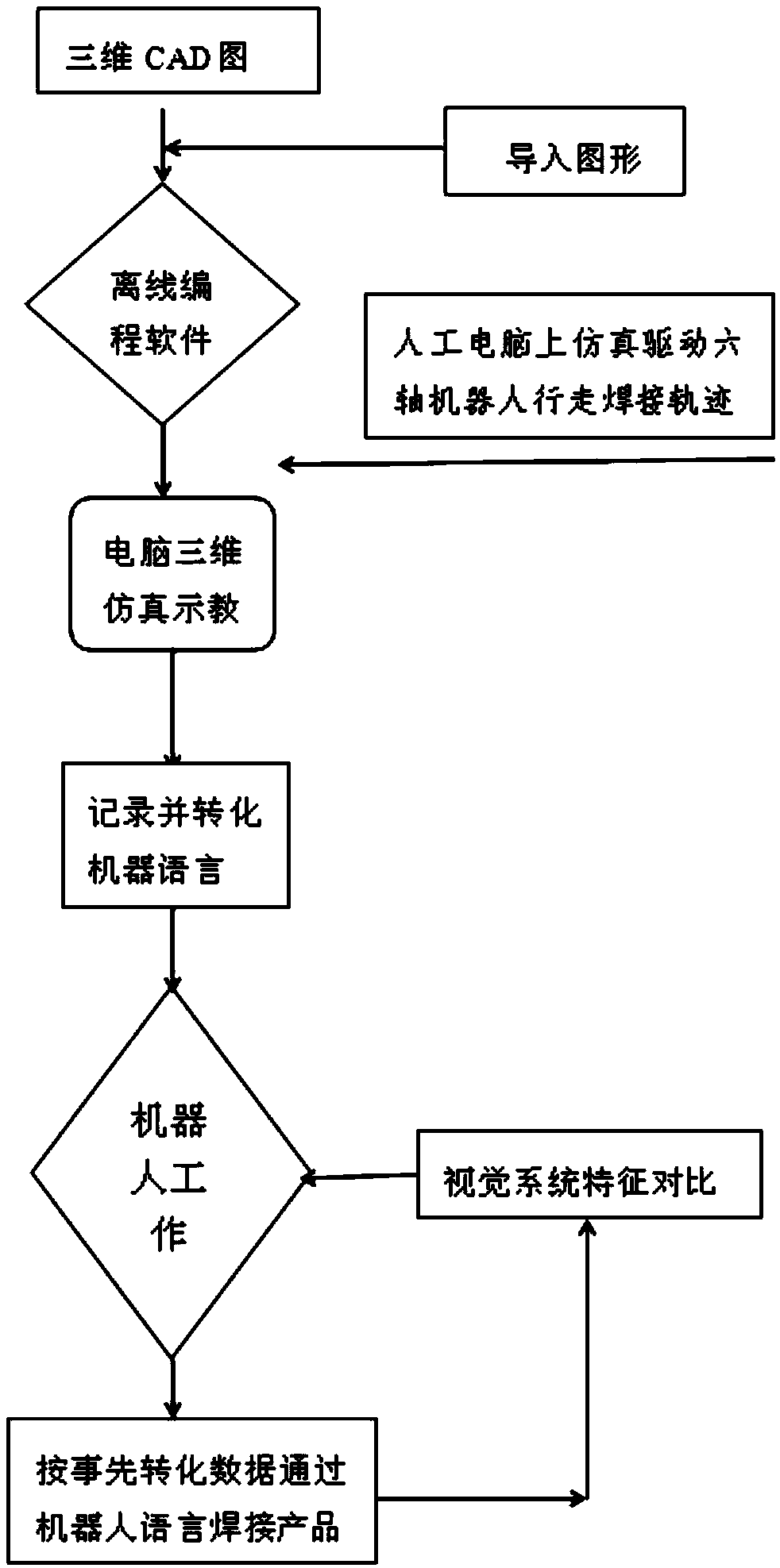
[0044] attached figure 1 It can be seen that a CAD drawing technology guides the robot automatic welding method,
[0045] On the 3D CAD weld seam drawing, the simulation teaching is carried out through the 3D drawing, and the movement trajectory and posture of the 6-axis robot of the 3D simulation are directly marked;
[0046] Convert the above trajectory and posture into a robot program or a language that the robot can understand through coordinate transformation;
[0047] The robot receives control instructions, uses the vision system camera to identify the feature points of the workpiece, and guides the robot to complete welding.
[0048] Generate 3D CAD drawings of processed products and import 3D CAD drawings into the control system;
[0049] The control system performs simulation drive; generates a six-axis robot walking welding trajectory;
[0050] Disp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More