

Underwater robot multi-mode jettison device
An underwater robot and multi-mode technology, applied to underwater ships, underwater operating equipment, motor vehicles, etc., can solve the problem of unmentioned ballast fixing or guiding, increase the weight and volume of equipment, increase the power of release action, etc. problems, to achieve the effect of making full use of space, compact structure and improving reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further described below in conjunction with the accompanying drawings.
[0027] Below in conjunction with accompanying drawing, the patent of the present invention is described in further detail.
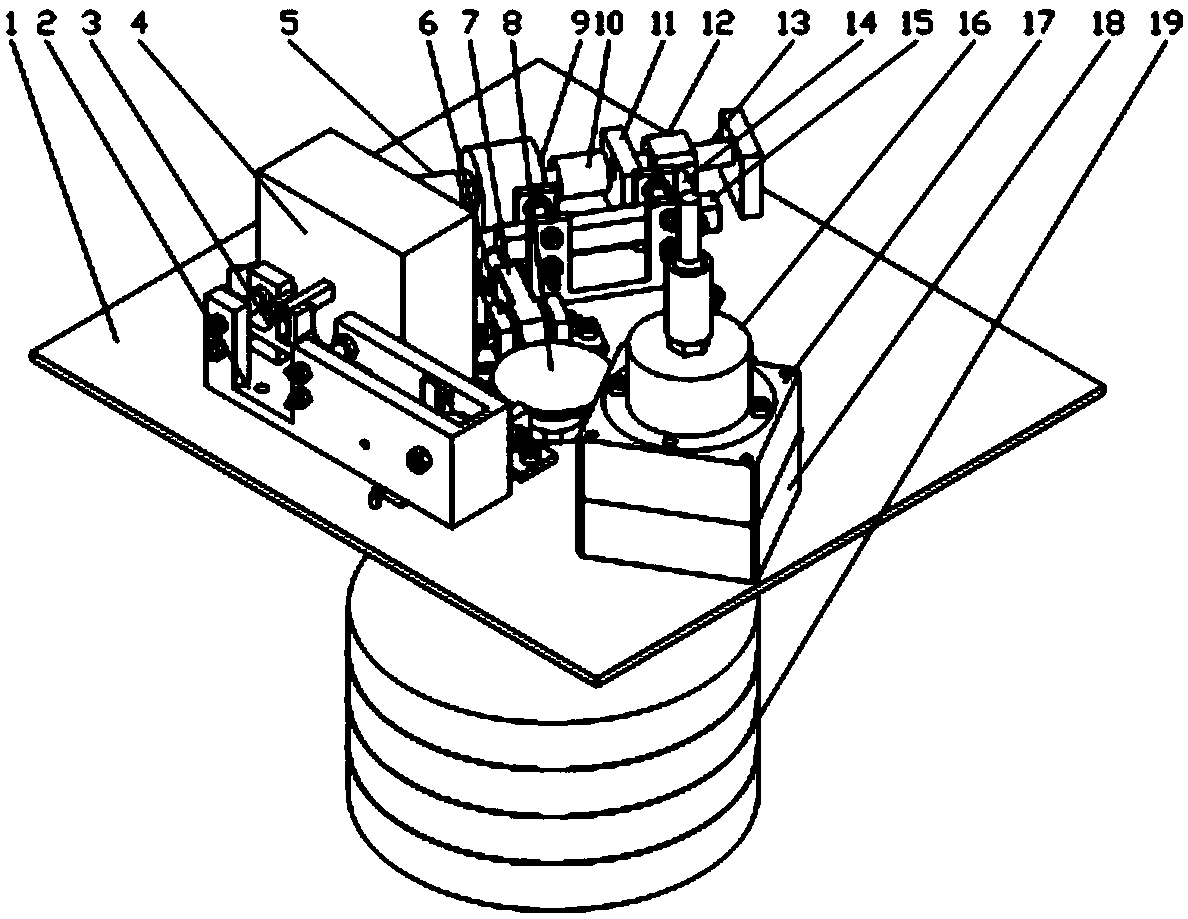
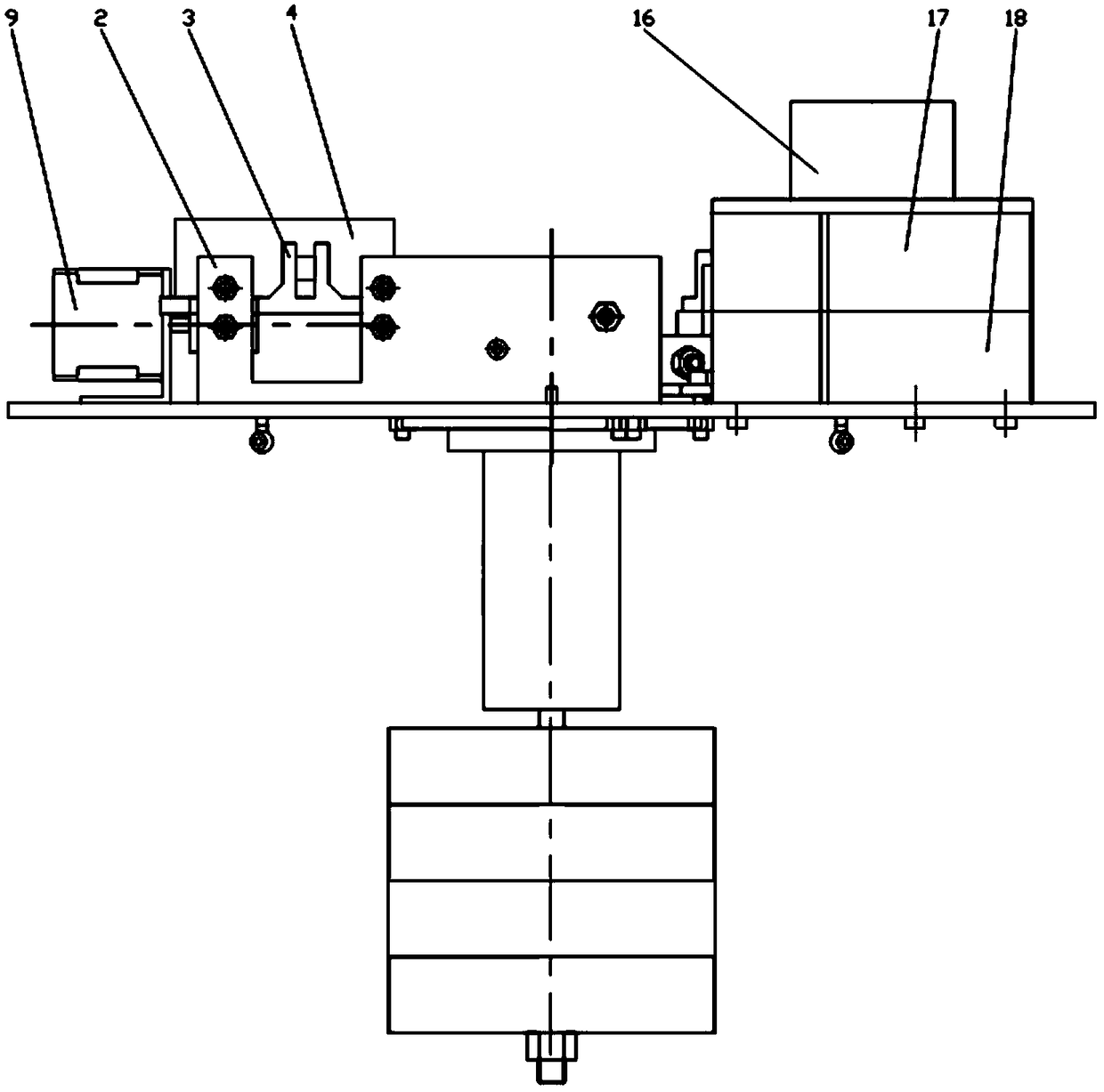
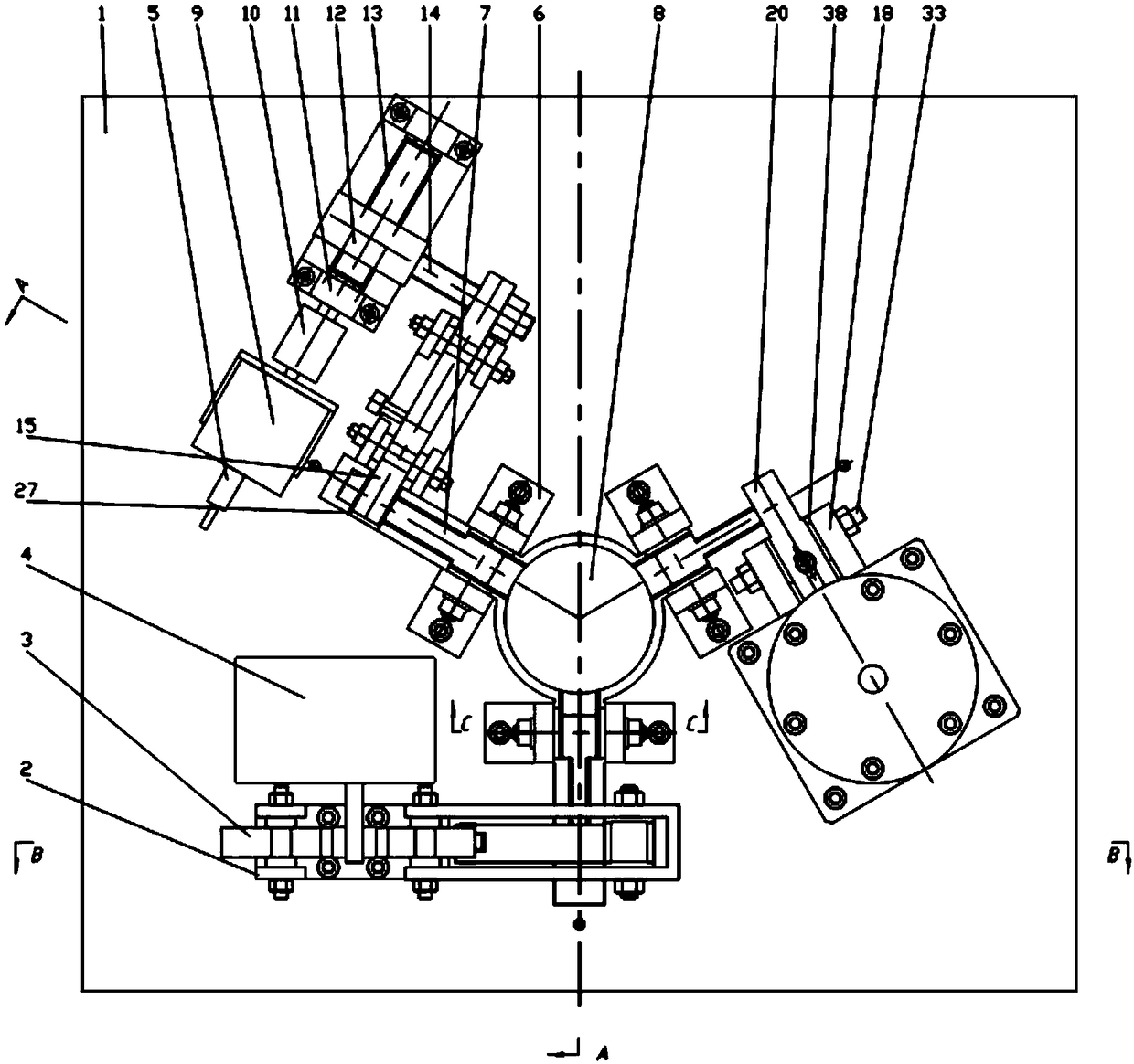
[0028] combine Figure 1~4 , what the present invention elaborates is a kind of underwater robot multi-mode dumping device, mainly by electromagnetic driving mechanism, motor driving mechanism, purely mechanical timing driving mechanism and release mechanism four parts. The electromagnetic drive mechanism is mainly composed of electromagnet 16, electromagnet bracket 17, electromagnet base 18, ballast block 19, first lever 20, etc., and the motor drive mechanism is mainly composed of motor 9, shaft coupling 10, screw support 11, First nut 12, leading screw 13, connecting rod 14, motor drive mechanism pressure bar 15 etc. constitute, pure mechanical timing drive mechanism mainly is made of base 2, mechanical drive pressure bar 13, pure mechanical ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More