

Large-angle imaging monitoring and manual control system for automobiles with robotic arms
A manual control and robotic arm technology, which is applied to vehicle components, optical observation devices, signal devices, etc., can solve the problems of inability to control the walking path of the robotic arm, trouble, and inability to guarantee the safety of the car, so as to facilitate risk pre-analysis and ensure safety. , Observation shows convenient and simple effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] In order to make the purpose, technical solution and advantages of the present invention clearer, the present invention will be further elaborated below in conjunction with the accompanying drawings.
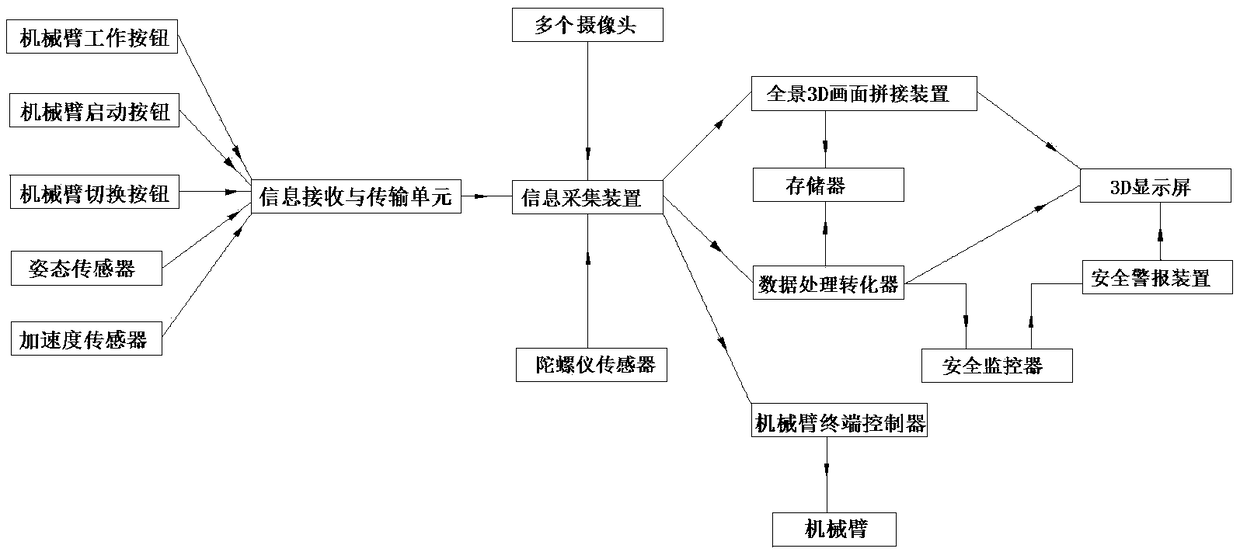
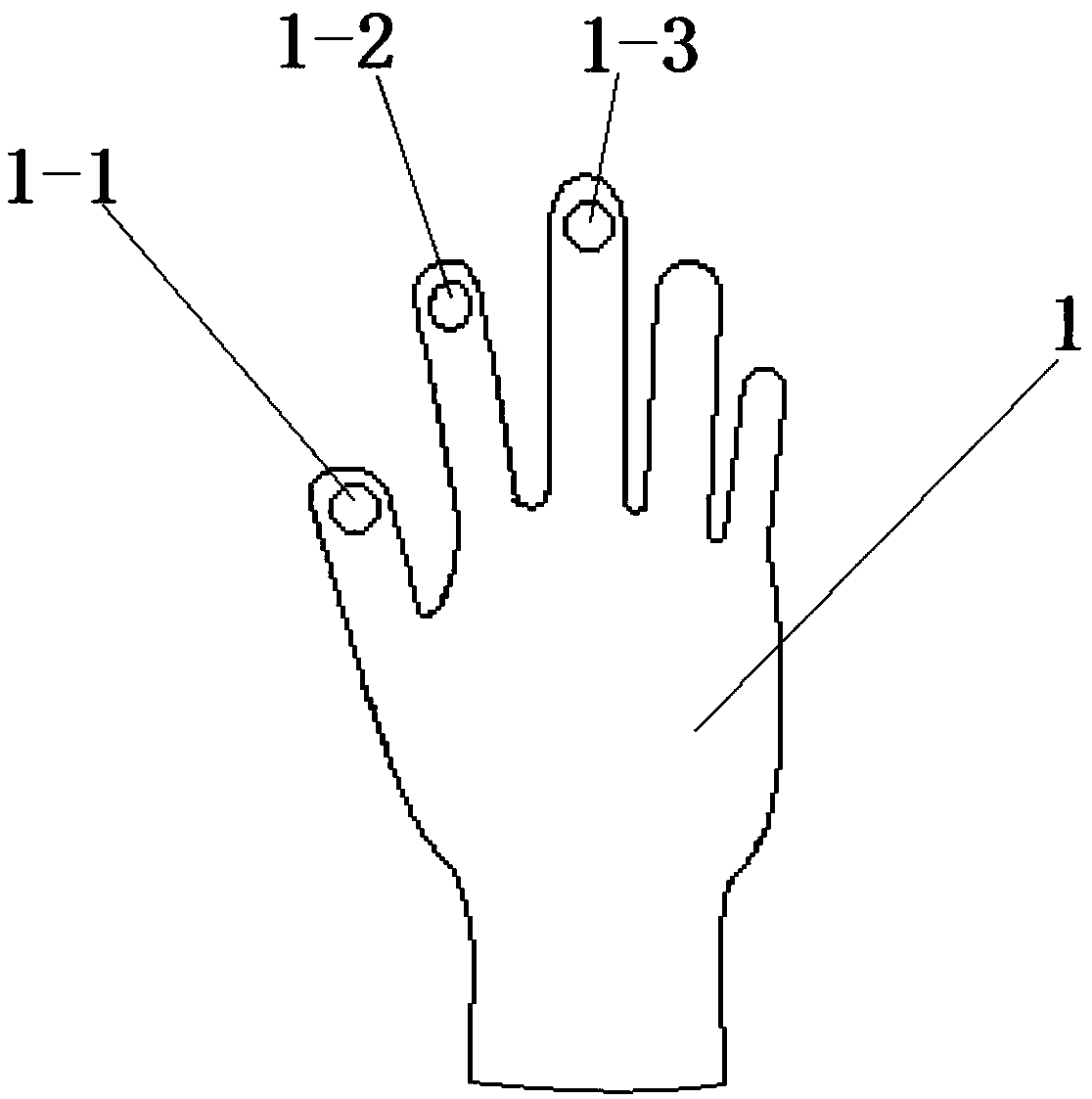
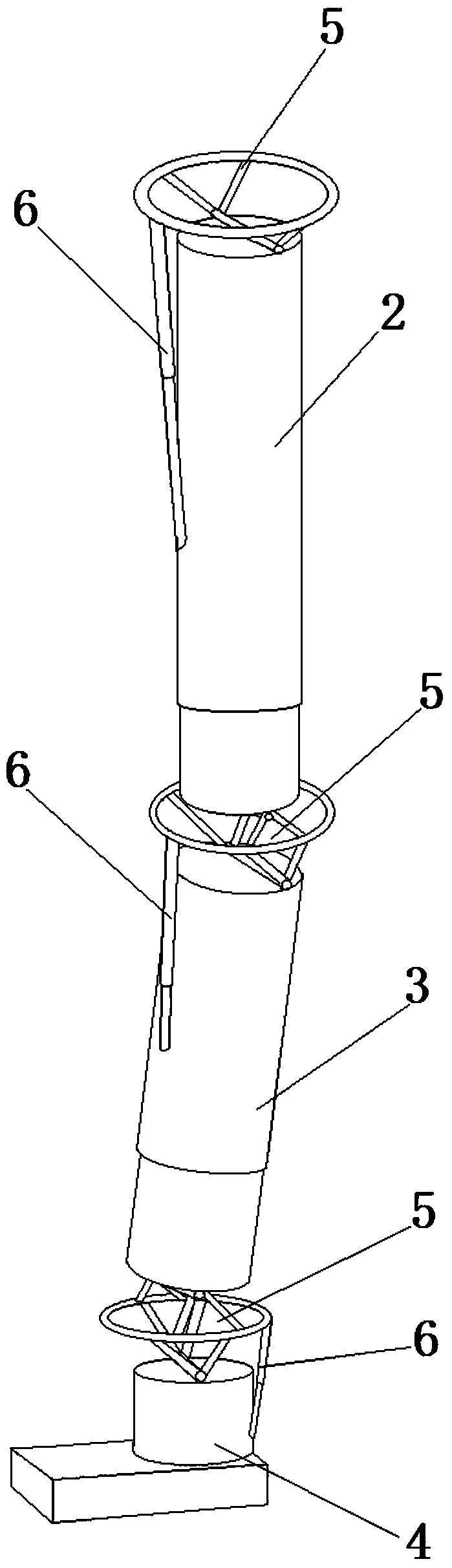
[0030]The large-view imaging monitoring and manual control system of a car with a robotic arm includes multiple cameras, terrain sensing devices, 3D imaging glasses, vehicle control terminals, four robotic arms, and control gloves. Multiple cameras and terrain sensing devices are located in the Outside the car, the vehicle-mounted control terminal is located inside the car, and the four robotic arms are located at the bottom of both sides of the car; The camera for real-time shooting; the cameras at each position are connected to the car in rotation; the terrain perception device includes a gyro sensor for sensing the attitude information of the car when it is running, and the gyro sensor is located at the center of the car; the 3D imaging glasses include a A 3D display s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More