

Beacon structure, pavement, sensing device, mobile machine, system and method
A technology of mobile machines and sensing devices, which is applied in the fields of intelligent networked vehicles, unmanned driving, mobile robots, and target positioning. It can solve the problems of low GPS positioning accuracy, lack of flexibility, high cost of laser radar and camera positioning, and achieve Overcome high cost and benefit high precision effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
[0075] In one embodiment of the present invention, the high-precision positioning system further includes an electronic map database, and the electronic map database includes the corresponding relationship between color codes and positioning information; the acquiring the positioning information of the mobile machine specifically includes: querying The electronic map database obtains the positioning information of the mobile machine. Wherein, the electronic map database is a database, and the electronic map database records the corresponding relationship between the color coding in the beacon structure and the positioning information of the mobile machine. Because the color-coded information read by the mobile machine is the color and / or color combination, not the coordinate data, the coordinate information (X coordinate value and Y coordinate value ) and heading angle information (the heading angle in the X direction and the heading angle in the Y direction), etc. The electr...
Embodiment 1
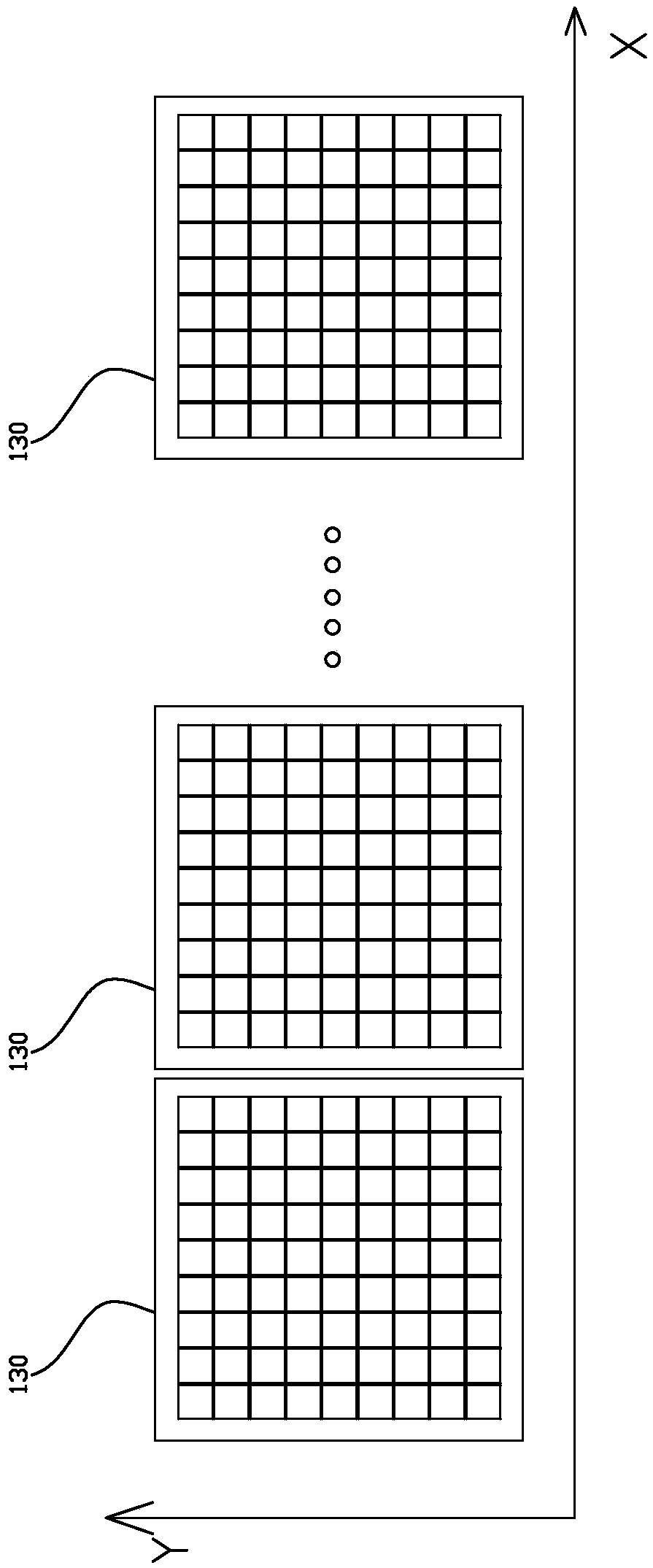
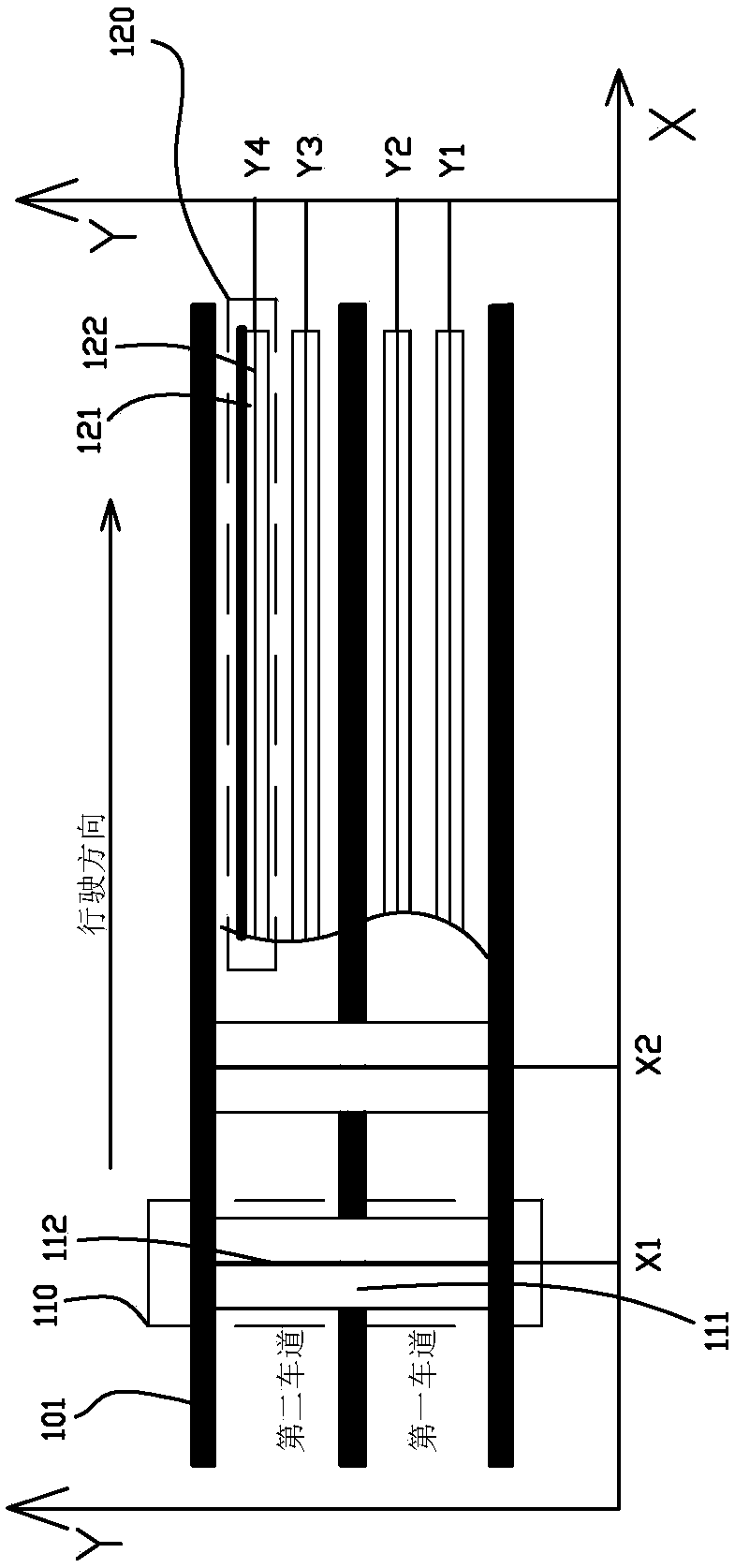
[0083] Such as Figure 6 As shown, in this embodiment, the road surface is a road surface, and the mobile machine is an unmanned vehicle. In this embodiment, the following design is made for the characteristics of driving on the road surface: First, due to the fast speed of driving on the road surface, the unmanned vehicle is required to read the road beacons quickly, so the color blocks are single-color blocks formed by single-color coding , which increases reading speed. Secondly, the establishment of the road surface coordinate system: because the road is sometimes a straight road and sometimes a curve, it is unified to establish an XY coordinate system based on the lane line 101. No matter whether the lane line 101 is a straight line or a curve, it is defined as a parallel lane line 101. The coordinate axis is the Y coordinate axis perpendicular to the lane line 101, so the X coordinate line can be a straight line or a curve. Lay multiple color beacon units along the X c...
Embodiment 2
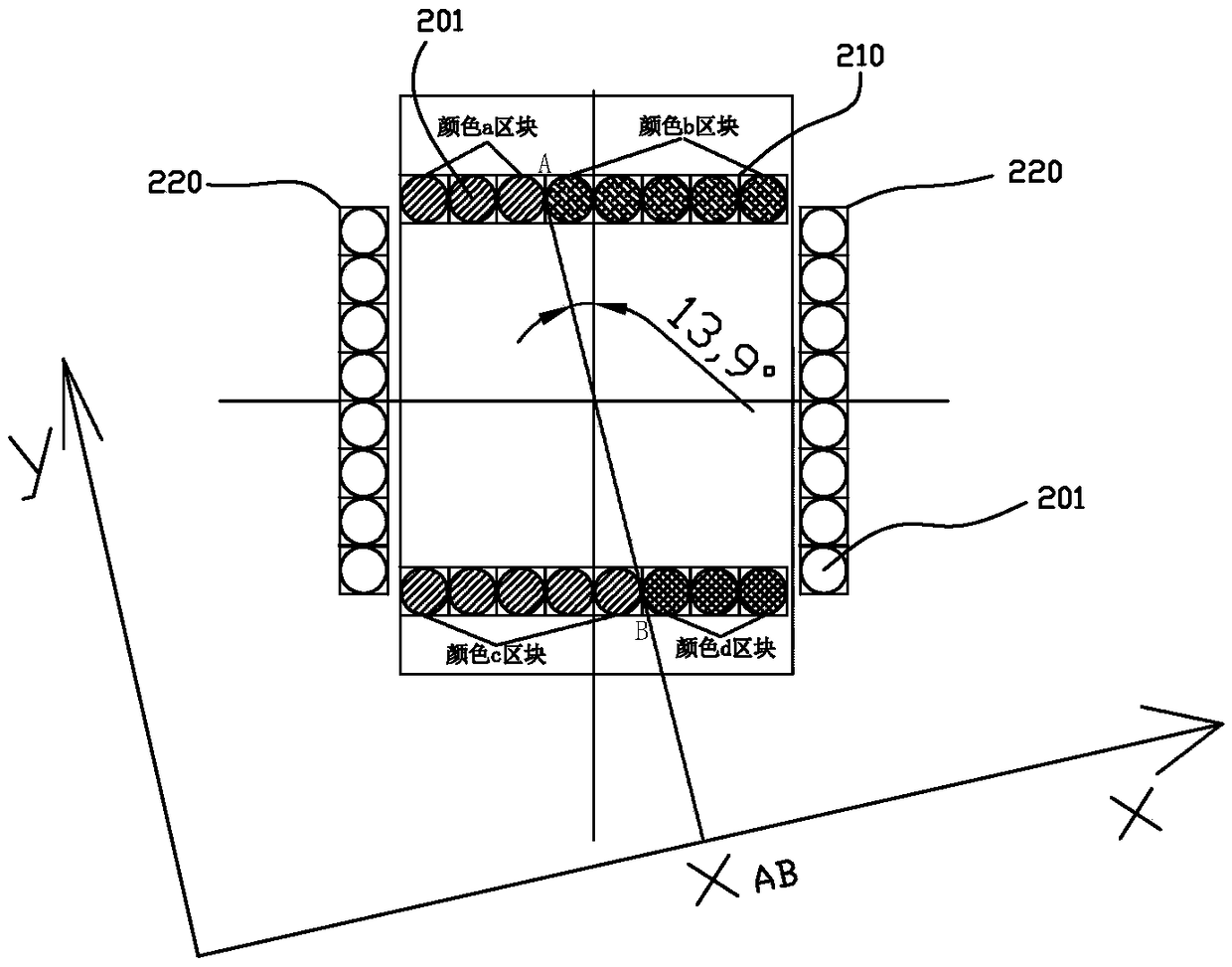
[0086] Such as Figure 7 As shown, in this embodiment, the application scenarios are roads in slow-moving areas such as squares, parking lots, and open spaces, and the mobile machine is a mobile robot. This embodiment makes the following design for the characteristics of road traffic in the slow-moving area: First, because the speed of the road in the slow-moving area is slow, the road is relatively complicated, and the color coding of the beacon structure requires a lot of color coding, so the color block adopts multi-color coding Formed multi-color mixed blocks. Secondly, the road surface coordinate line is a straight line, which can be spliced with PVC floor tiles; thirdly, the road surface in the slow-moving area is evenly divided into multiple color beacon areas, and visible light (ambient light) can be used to locate data (different color blocks of visible light) As a third parameter to distinguish different color beacon units.
[0087] Specifically, in a color beaco...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More