

Cross coupling control method for sliding mode cloud model of crawler-type mobile robot
A mobile robot, cross-coupling technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of error, robot force change, and the drive characteristics of the crawler motors on both sides cannot be achieved, and achieve magnetic permeability. Uniform, non-saturated magnetic circuit effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0083] A sliding mode cloud model cross-coupling control method for a crawler mobile robot of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
[0084] A sliding mode cloud model cross-coupling control method for a crawler mobile robot, comprising the following steps:
[0085] Step 1: Establish a tracked mobile robot tracking error model;
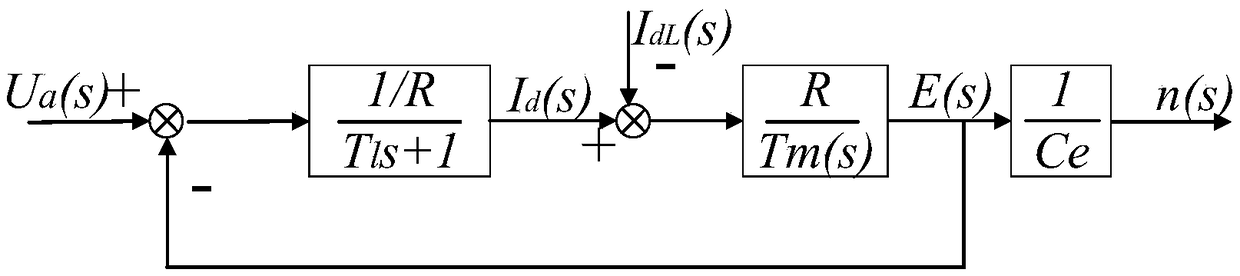
[0086] Step 2: Establish the mathematical model of the brushless DC motor of the crawler mobile robot;
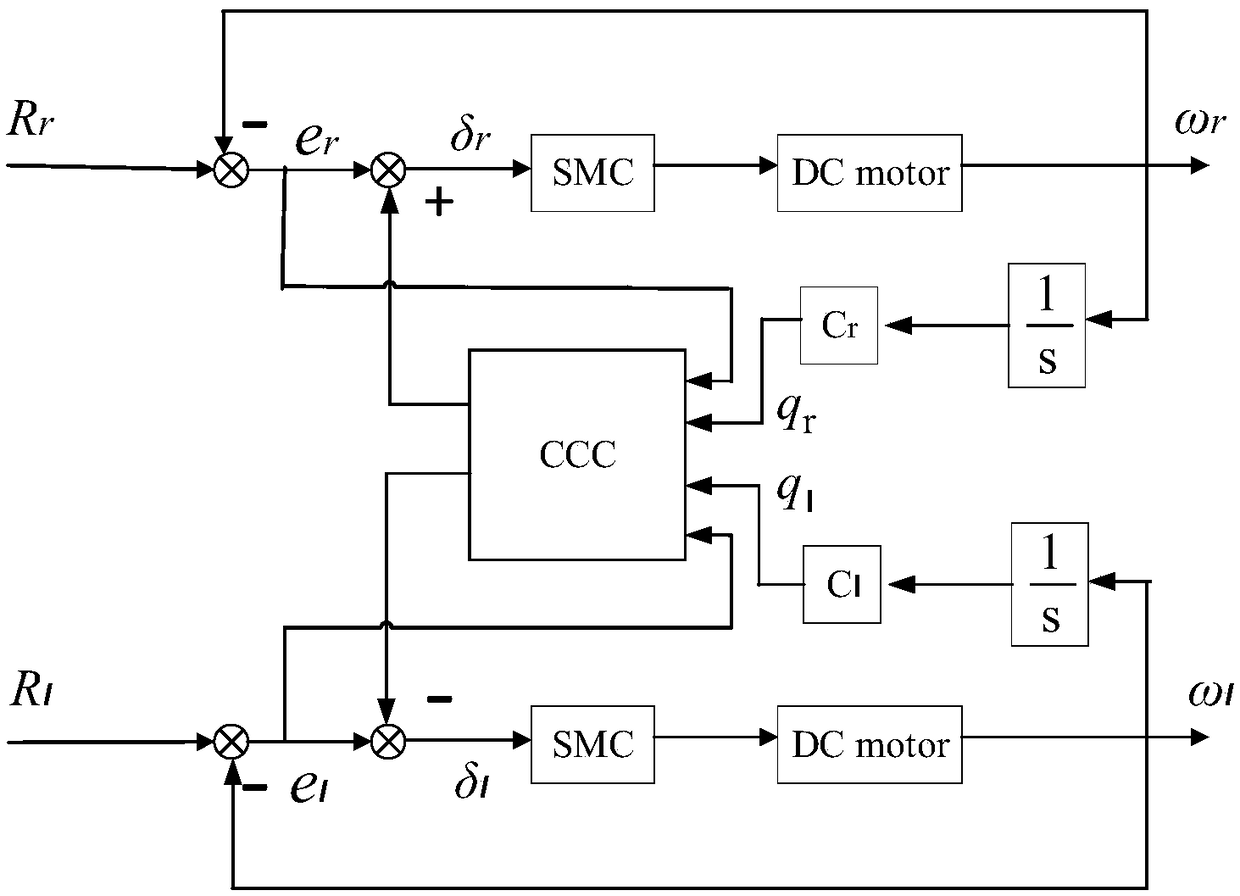
[0087] Step 3: Establish the speed loop sliding mode controller of the tracked mobile robot;
[0088] Step 4: Establish the cross-coupled controller of the crawler mobile robot sliding mode cloud model.
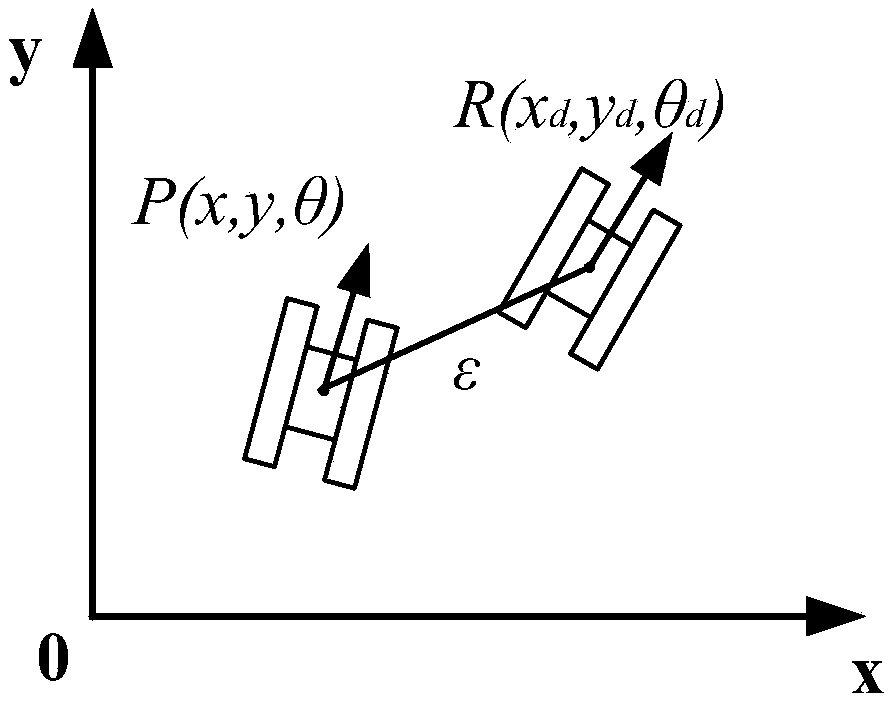
[0089] Further, combine figure 1 , the establishment of the tracked mobile robot tracking error model described in step 1 is as follows:
[0090] First, the kinematics modeling of the tracked mobile robot is carried out; if the slip of the track is ignored...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More