Mecanum wheel omni-directional mobile trolley with adaptive adjustment of gear train and method thereof
An adaptive adjustment, omnidirectional movement technology, applied in the direction of motor vehicles, wheels, vehicle parts, etc., can solve the problems of reducing the execution accuracy of the robot arm and the function failure of the robot arm, and achieve the effect of avoiding slippage and moving accurately.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0029] The technical solutions of the present invention will be described in further detail below with reference to the accompanying drawings.
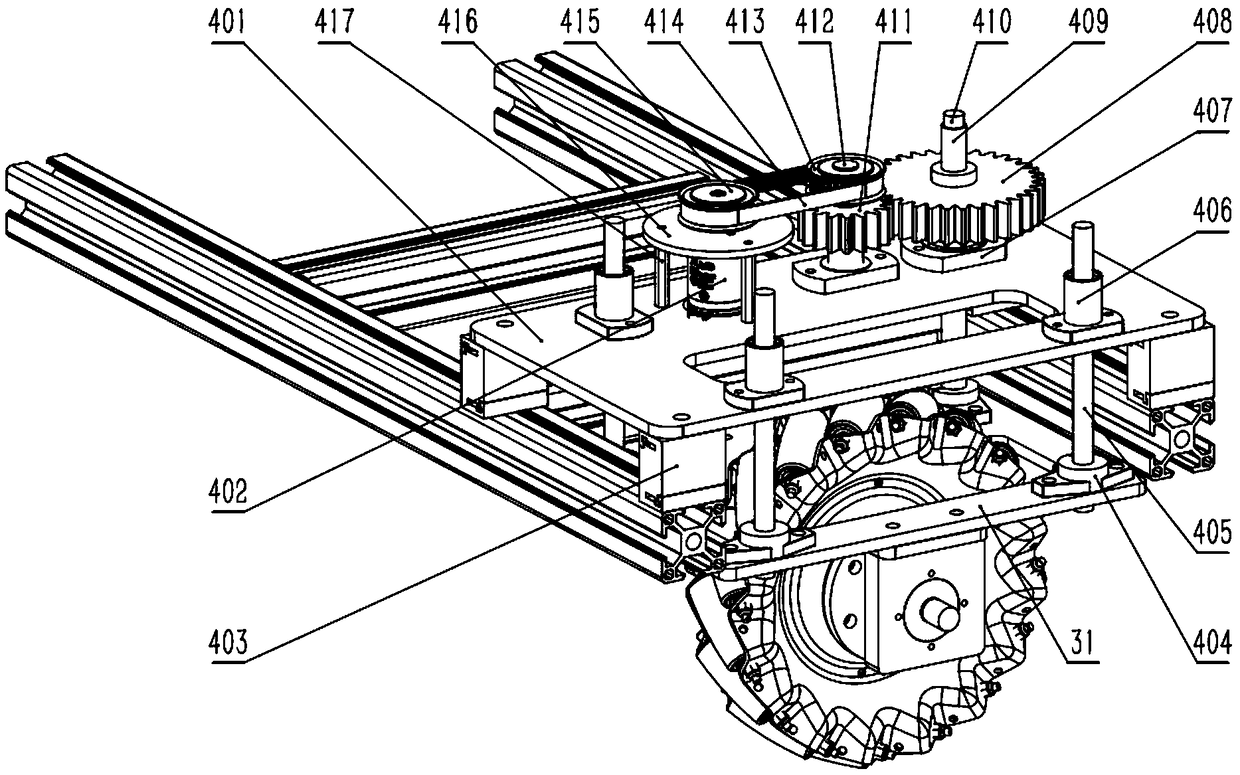
[0030] like figure 1 As shown, the main body of the mobile trolley is the body frame 1, and the four corners of the body frame 1 are equipped with Mecanum wheel trains, wherein the three Mecanum wheel trains in the triangle are fixed on the bottom of the body frame 1, and the other corners are fixed on the bottom of the body frame 1. A Mecanum wheel train is fixed on the bottom of the body frame 1 through the wheel train adaptive adjustment mechanism.
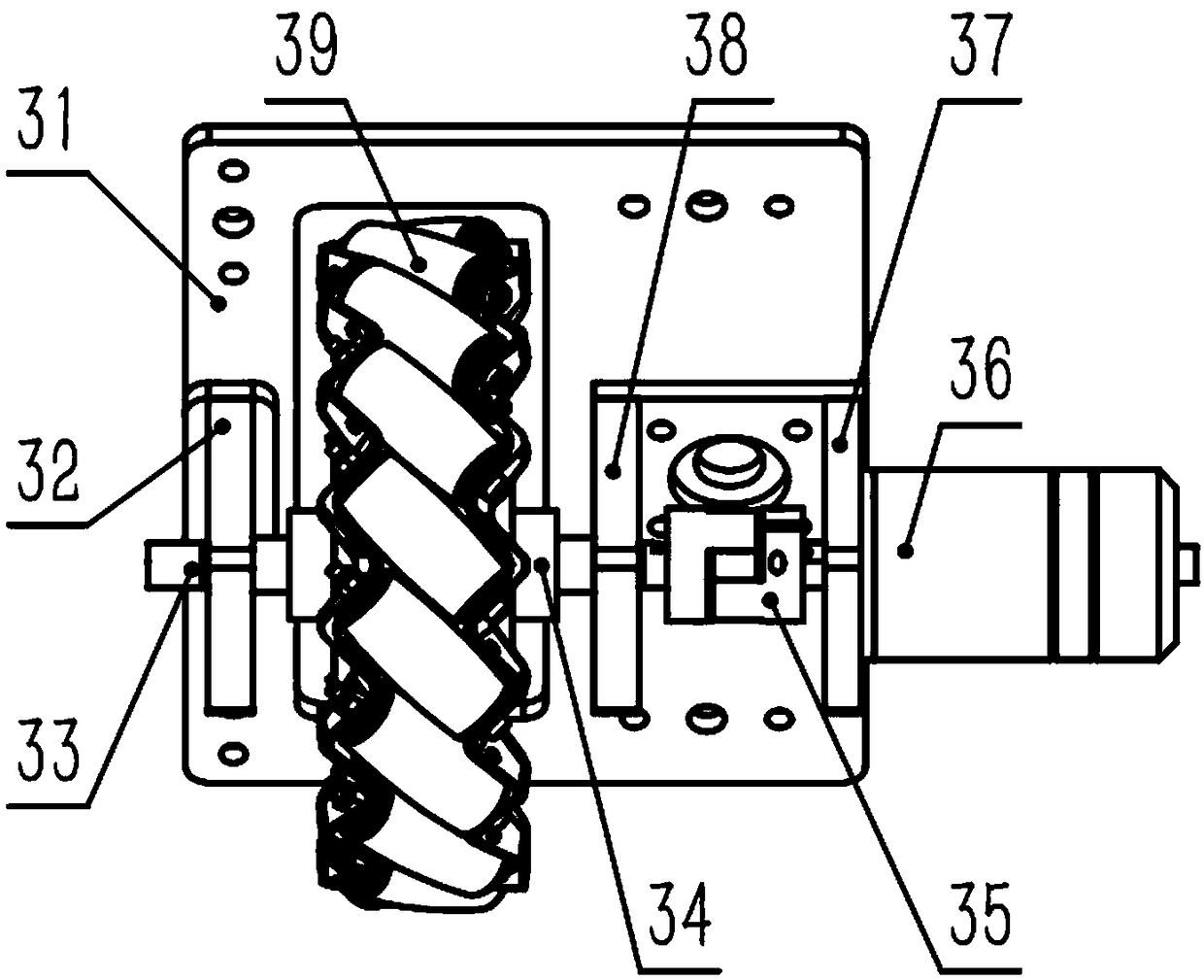
[0031] like figure 2 As shown, the Mecanum wheel train includes a wheel train fixing plate 31 and an auxiliary belt seat bearing 32, an active belt seat bearing 38 and a motor seat 37 installed on the wheel train fixing plate 31. The Mecanum wheel train passes through The wheel train fixing plate 31 is installed in cooperation with the body frame 1. A through slot is provided in the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More