A real-time detection method for plant protection UAV spraying effect
A plant protection UAV, real-time detection technology, applied in image analysis, image enhancement, instruments, etc., can solve the problems of long detection time, inefficient spraying, large detection error, etc., to achieve fast image acquisition and processing speed, temperature High sensitivity and short detection time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
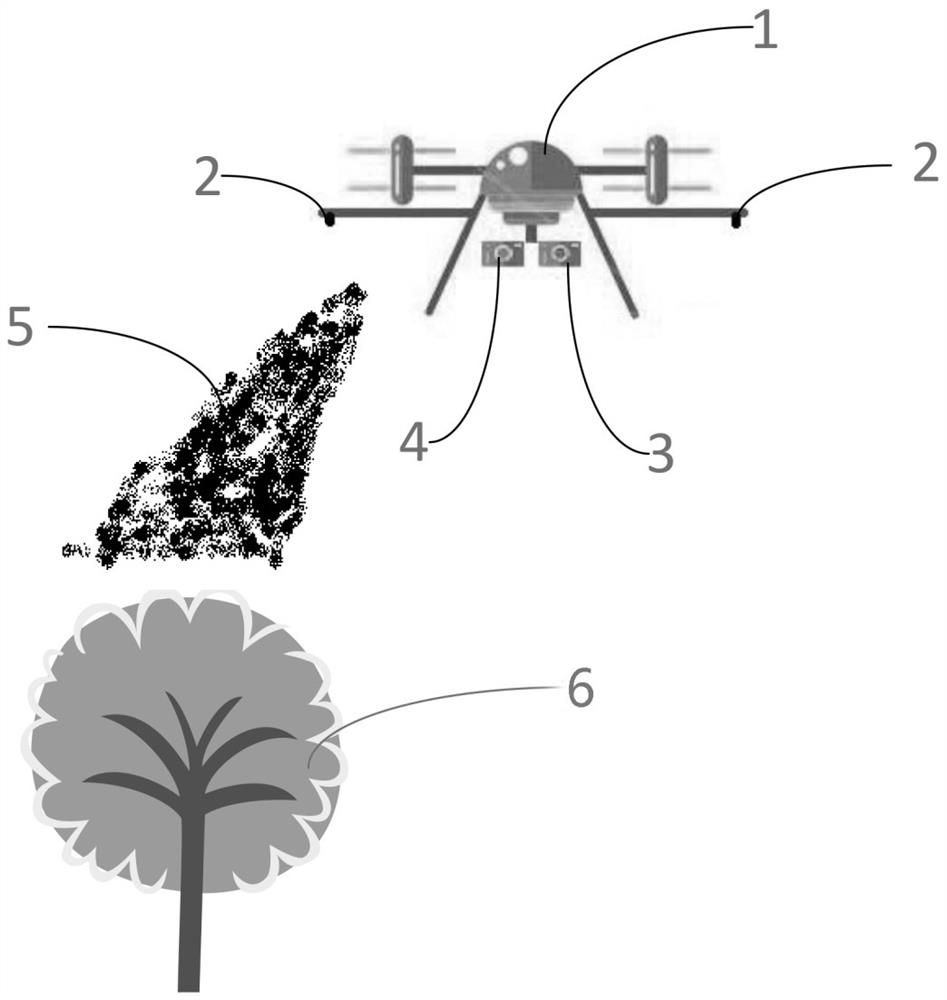
[0028] A real-time detection method for spraying effect of plant protection UAV 1, such as figure 1 , 2 Described, described drone 1 is provided with machine vision camera device 4 and infrared thermal imaging camera device 3, comprises the following steps:
[0029] S1: Adjust the temperature of the agent 5, so that the temperature of the agent 5 is within the tolerance of the spraying target 6, and make the temperature difference between the temperature of the agent 5 and the temperature of the spraying target 6, and the temperature difference is greater than that of the infrared thermal imaging camera device 3 thermal resolution, and then place the temperature-regulated medicine 5 on the UAV 1;
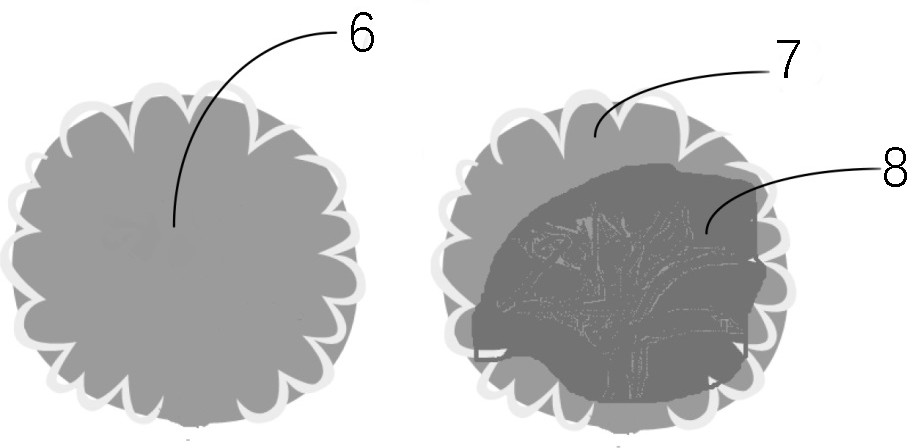
[0030] S2: Spray the temperature-adjusted agent 5 on the spraying target 6 through the spraying device 2 on the drone 1, and the spraying area 8 of the spraying target 6 and the non-spraying area 7 will form a temperature difference; spraying The device is a nozzle;
[0031] S3: ...
Embodiment 2
[0045] The technical solution of this embodiment is basically the same as that of Embodiment 1, the difference is that when the temperature difference between the spraying target 6 and the surrounding environment is greater than the thermal resolution of the infrared thermal imaging camera device 3, only the infrared light on the drone 1 The thermal imaging camera device 3 collects the infrared image of the spraying target 6, performs temperature threshold segmentation on the collected infrared image, detects the spraying area 8 according to the temperature difference between the spraying area 8 and the non-spraying area 7, and divides the pixels of the threshold value The number is calculated, corresponding to the total area S of the spraying area 8 c At the same time, according to the temperature difference between the spraying target 6 and the environment, the canopy contour of the spraying target 6 is detected, the number of pixels divided by the threshold is calculated, an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com