

target recognition and scene modeling system based on RGBD
A target recognition and scene modeling technology, applied in scene recognition, character and pattern recognition, instruments, etc., can solve the problems of poor target recognition and scene modeling accuracy, data without reference and comparison, slow data processing speed, etc. The extraction and processing rules are consistent, the data processing speed is improved, and the judgment is accurate.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
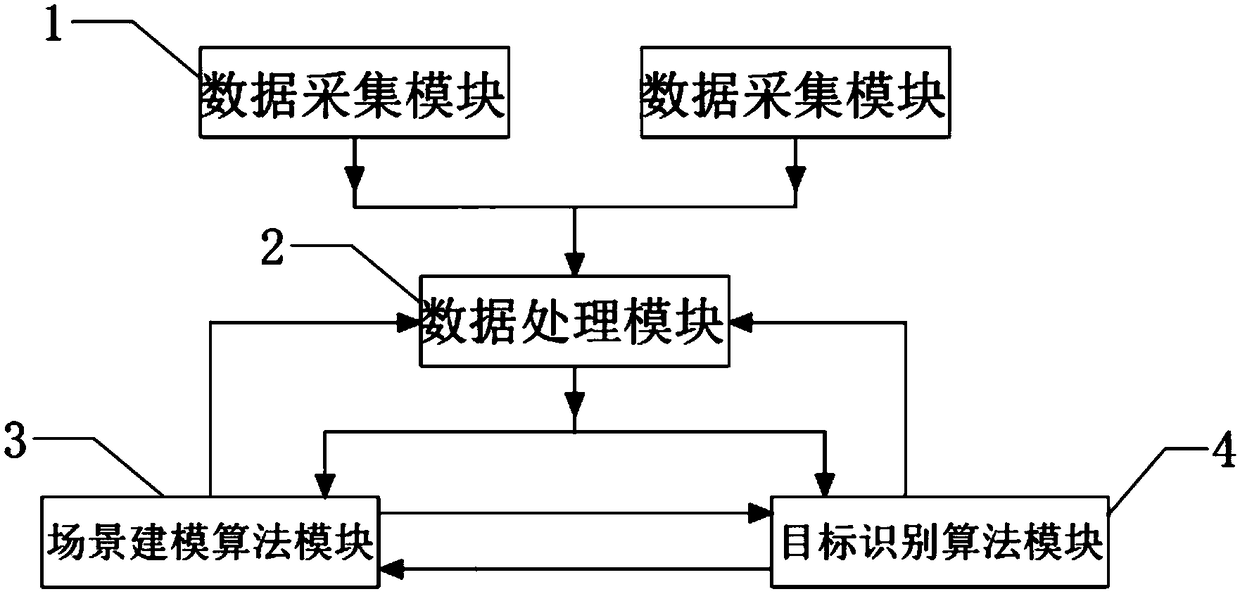
[0054] Such as figure 1 As shown, a RGBD-based target recognition and scene modeling system includes a data acquisition module 1, a data processing module 2, a scene modeling algorithm module 3, and a target recognition algorithm module 4, and the data acquisition module 1 is used to collect RGBD Image, data acquisition module 1 selects network camera, radar or depth camera, and described RGBD image data includes RGB image and depth image, and RGB image is color image. Web cameras are used to capture color images, and radar or depth cameras are used to capture depth images.
[0055] The data processing module 2 is used to store local data sets, control the work of each functional module, and process the data transmitted from each functional module. The local data set stores training parameters, including: scene modeling parameters used to guide modeling after being trained by the local data set, such as classification method, geometric feature matching of scene objects, lengt...
Embodiment 2
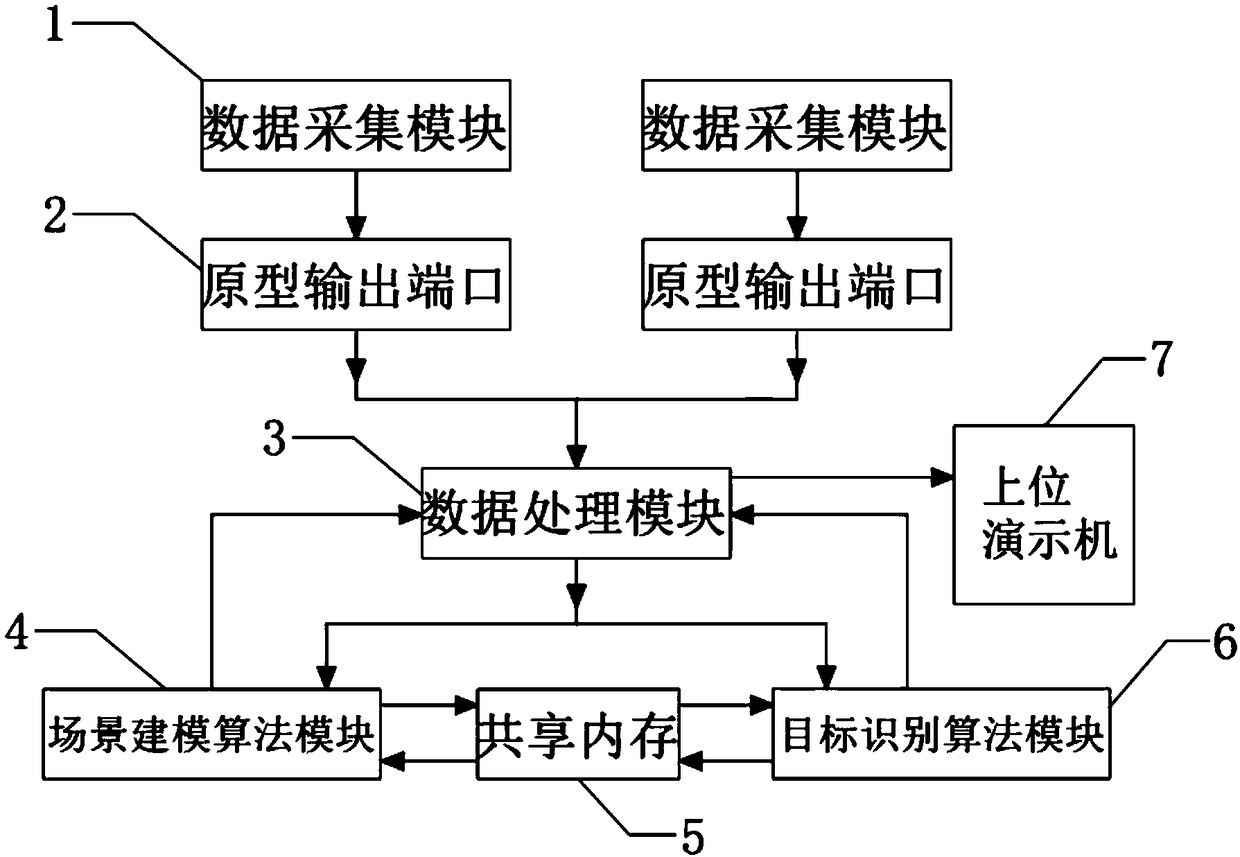
[0089] Such as image 3 As shown, a RGBD-based target recognition and scene modeling system includes a data acquisition module 1, a data processing module 2, a scene modeling algorithm module 3, and a target recognition algorithm module 4, and the data acquisition module 1 is used to collect RGBD For images, the scene modeling algorithm module 3 is used for modeling matching and scene modeling; the target recognition algorithm module 4 is used for target detection matching and target recognition. The data acquisition module 1, the data processing module 2, the scene modeling algorithm module 3, and the object recognition algorithm module 4 are the same as those in the first embodiment.
[0090] In order to transmit RGBD data safely and conveniently, a prototype output port 6 is set between the data acquisition module 1 and the data processing module 2. The prototype output port 6 can choose a variety of communication ports, preferably a USB port.
[0091] In order to output i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More