

An in-situ measurement method of adherent mushroom vision based on RGB-D camera
An in-situ measurement and mushroom technology, which is applied in measuring devices, computer components, image data processing, etc., can solve the problem of inaccurate mushroom size and achieve the effects of short running time, high real-time performance and small error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
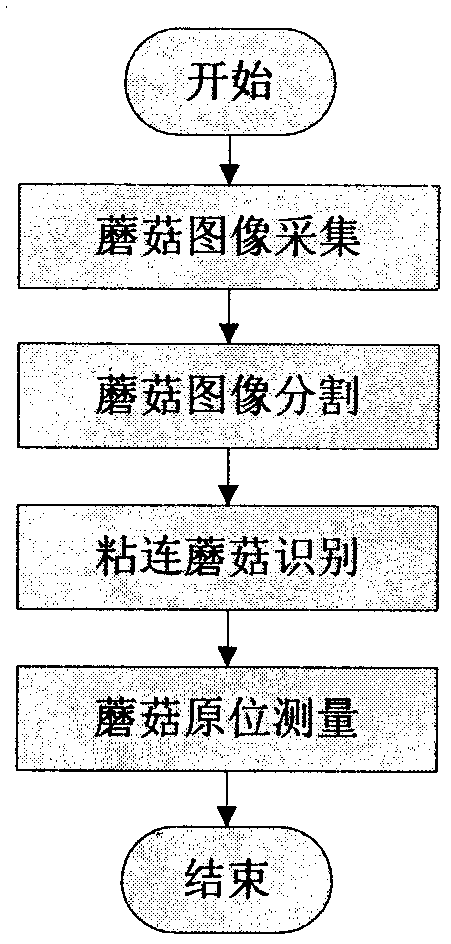
[0026] The specific flow chart of the patent of the present invention is as follows: figure 1 As shown, the specific steps of the patent of the present invention will be further described below in conjunction with the accompanying drawings.
[0027] 1. Mushroom Image Collection
[0028] The present invention adopts RGB-D camera to continuously collect images, and the video collection speed is 60 frames / second.
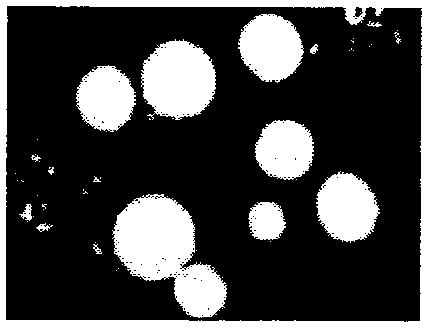
[0029] 2. Mushroom Image Segmentation
[0030] This patent first calculates the mean value of the gray value of non-zero pixels in the depth image for the image, and if the mean value is greater than the gray value of the point cloud on the soil surface, the mode value is used to represent the depth value of the point cloud on the soil surface. The height of the mushroom should be at least 20mm, set the dynamic threshold, binarize the depth image to ensure that the mushroom area with a specific diameter is extracted, and perform edge smoothing such as morphological o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More