

A point cloud registration method based on extended Gaussian image
An extended image and point cloud registration technology, applied in image enhancement, image analysis, image data processing, etc., can solve the problems of long time consumption, difficulty in balancing efficiency and accuracy, and high cost of SAC-IA algorithm, and achieve time-consuming Short, improve division efficiency, avoid local optimization effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
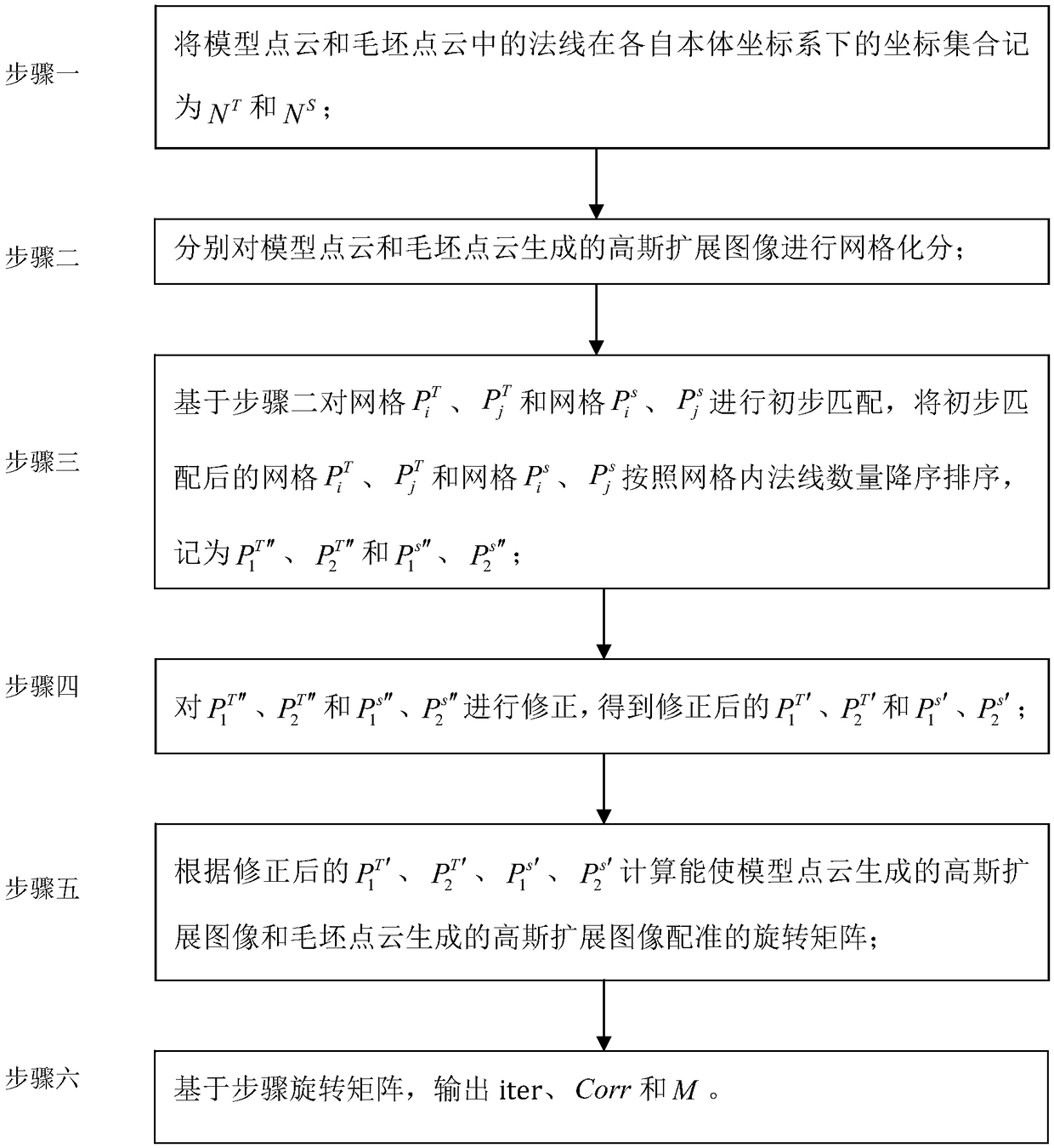
[0030] Specific implementation mode one: combine figure 1 Describe this embodiment, a kind of point cloud registration method based on extended Gaussian image of this embodiment specific process is:
[0031] Step 1. Record the coordinate sets of the normals in the model point cloud and blank point cloud in their respective body coordinate systems as N T and N S (Get the normal position);
[0032] The model point cloud is a point cloud of an ideal mechanical part model;
[0033] The blank point cloud is the point cloud of the blank (the blank processed by the factory and scanned by the scanner);
[0034] Step 2, respectively meshing the extended Gaussian image (EGI) generated by the model point cloud and the blank point cloud;
[0035] Step 3. Based on step 2, pair grid P i T , and grid P i s , Perform preliminary matching, and the grid P after preliminary matching i T , and grid P i s , Sort in descending order according to the number of normals in the grid...
specific Embodiment approach 2
[0047] Specific embodiment two: the difference between this embodiment and specific embodiment one is that in said step two, the Gaussian extended image (EGI) generated by the model point cloud and the blank point cloud is respectively meshed and divided, and the specific process is:
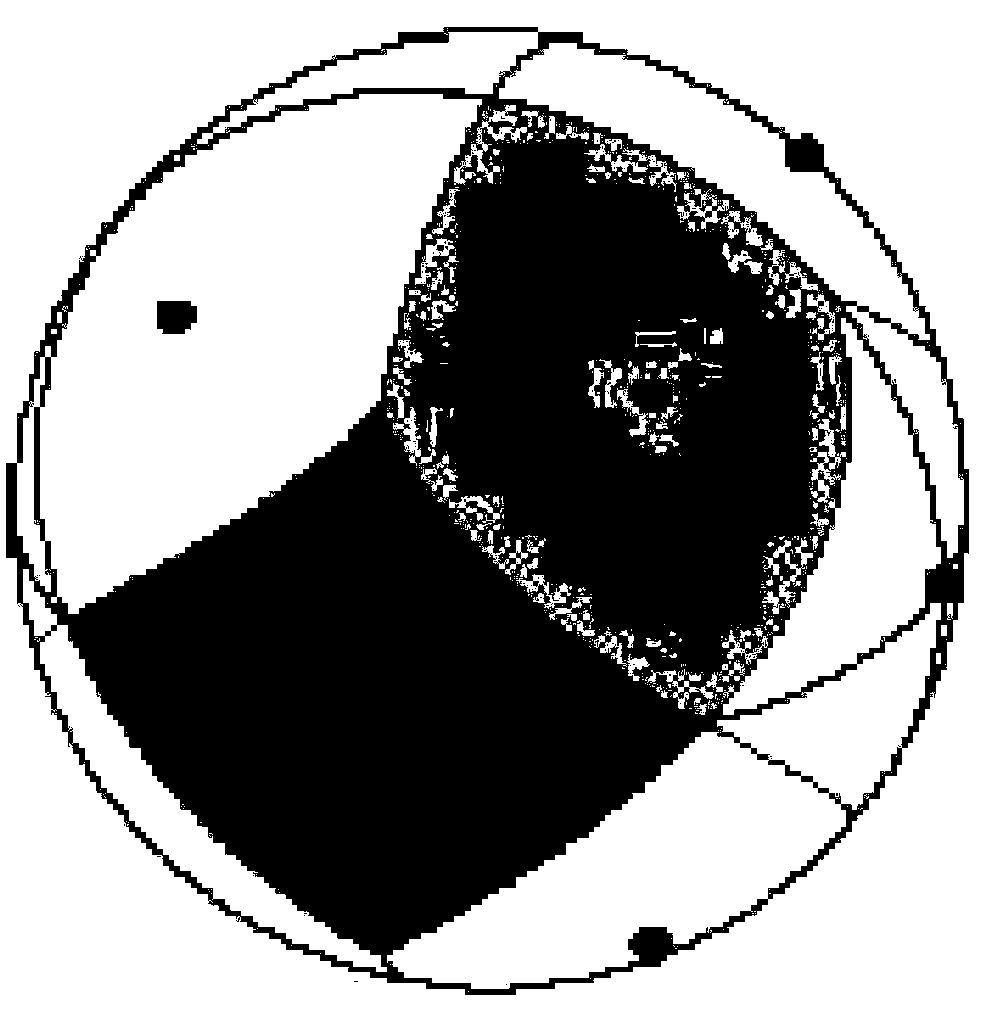
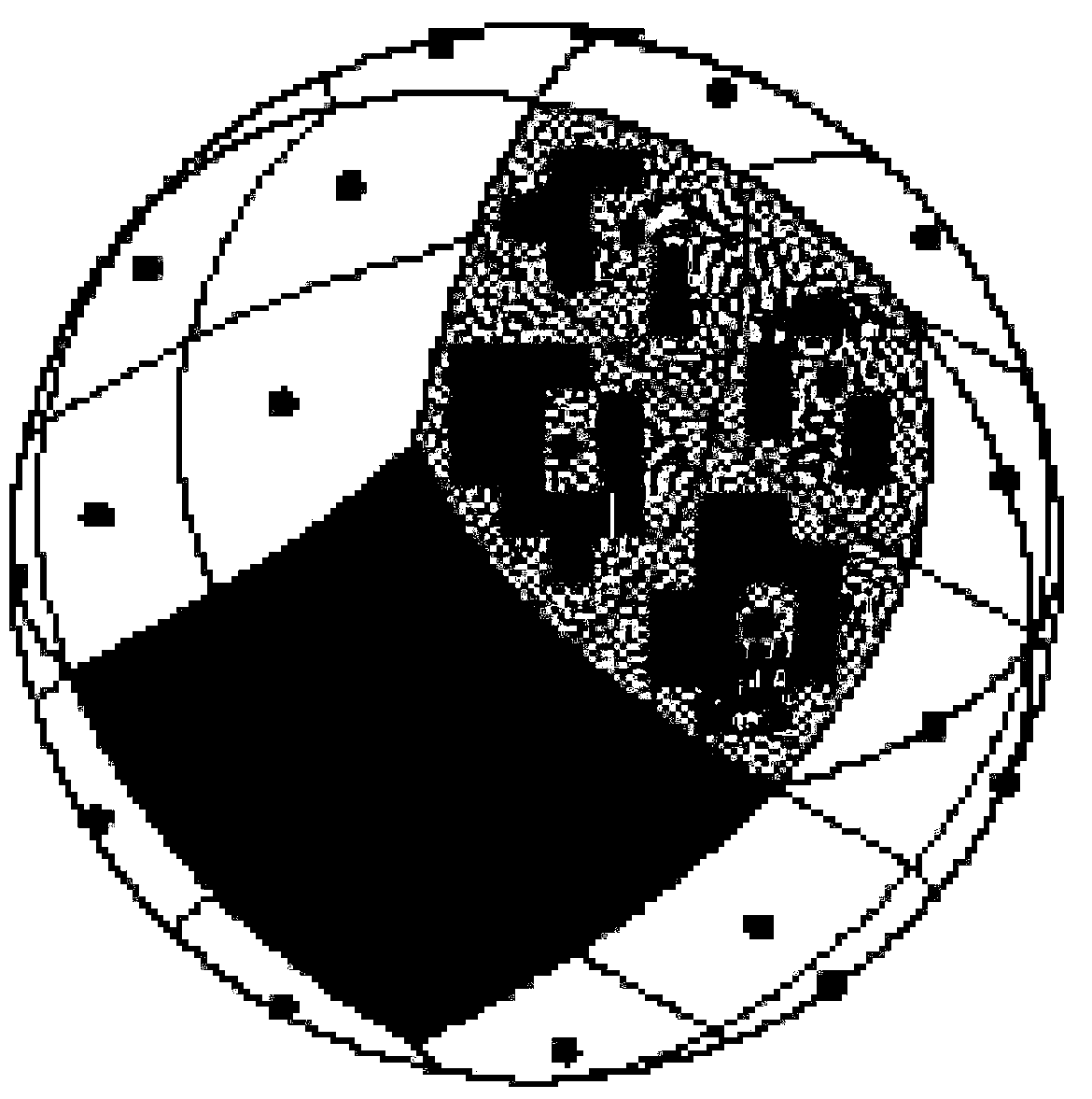
[0048] HEALPix (Hierarchical Equal Area isoLatitude Pixelization) was originally applied to the research of the cosmic microwave background to support the discretization of spherical high resolution. HEALPix can be divided into several levels according to the resolution, the lowest level is 12 grids. HEALPix divides the sphere as figure 2 , 3 , 4, and 5.
[0049] HEALPix has the following characteristics:
[0050] The grid blocks are structured hierarchically and the data is easily accessible.
[0051] The method of generating grid blocks is simple and the operation is efficient.
[0052] The sphere is divided into equal-sized surface quadrilaterals, each meshing with the same area.
[00...
specific Embodiment approach 3
[0059] Specific embodiment 3: The difference between this embodiment and specific embodiments 1 or 2 is that in the step 3, the pairing of the grid P based on the step 2 i T , and grid P i s , Perform preliminary matching, and the grid P after preliminary matching i T , and grid P i s , Sort in descending order according to the number of normals in the grid, denoted as P 1 T″ , and P 1 s″ , The specific process is:
[0060] Correspondence point identification
[0061] Finding the corresponding mesh can be a challenging job, especially when the object's normals are somewhat evenly distributed. Due to the distribution of normal vectors, a grid with a high density may have a grid with a similar density in the opposite direction, causing errors in the calculation of the rotation matrix. Also, a good algorithm should be insensitive to rotation and position changes of the mesh. Here we use a simple yet effective method to find a mesh in the target EGI that i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More