

Self-walking type feeding robot for aquaculture
A technology of aquaculture and robotics, applied in the fields of application, fish farming, climate change adaptation, etc., can solve the problems of heavy workload, affecting aquatic growth, uneven feeding, etc., and achieve the effect of expanding the feeding area and reducing the amount of sticking to the wall
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
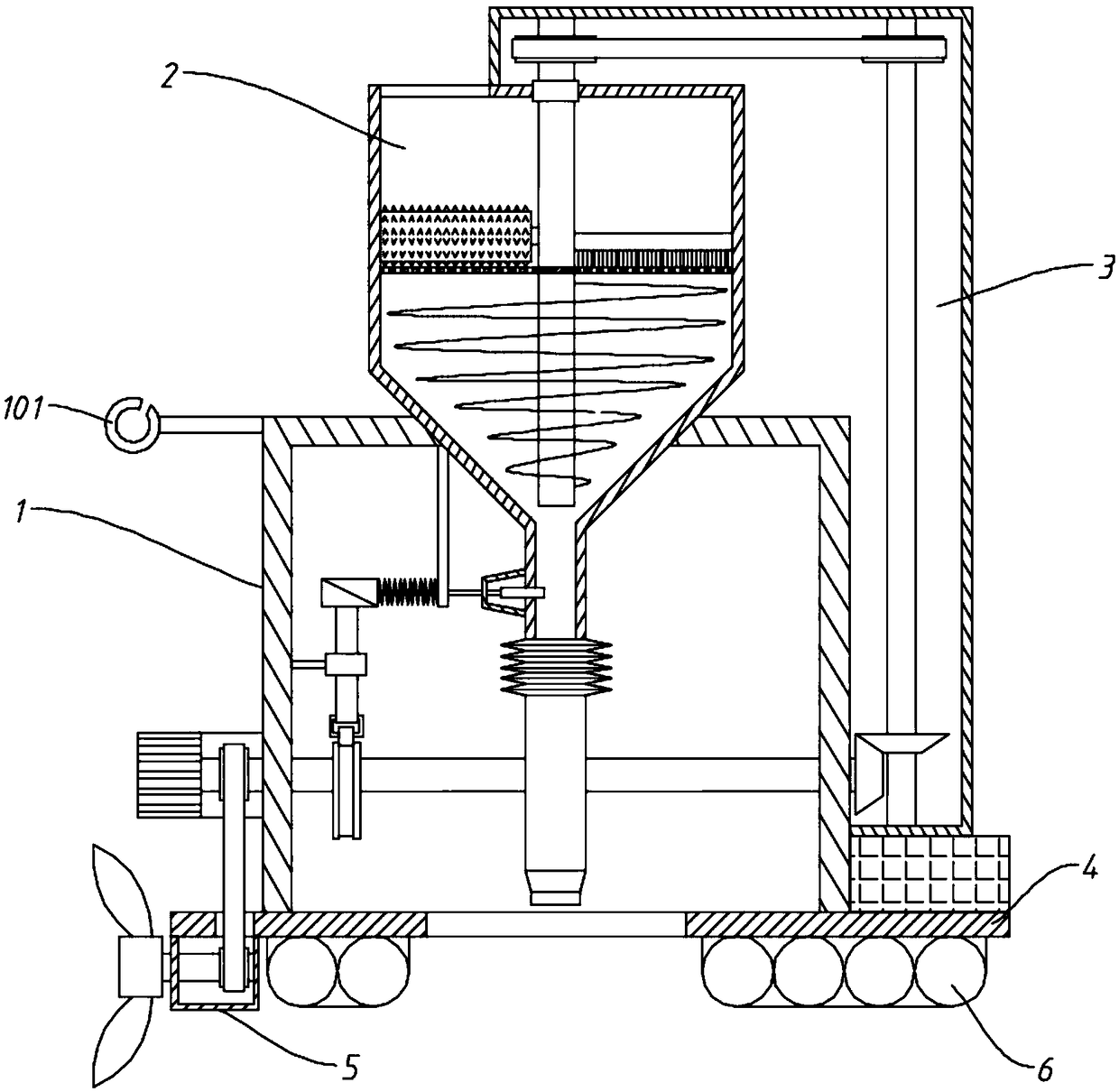
[0048] A self-propelled feeding robot for aquaculture, comprising a housing 1, a barrel 2, a bottom plate 4, a buoy 6, a servo motor 801 and a propulsion assembly 5;
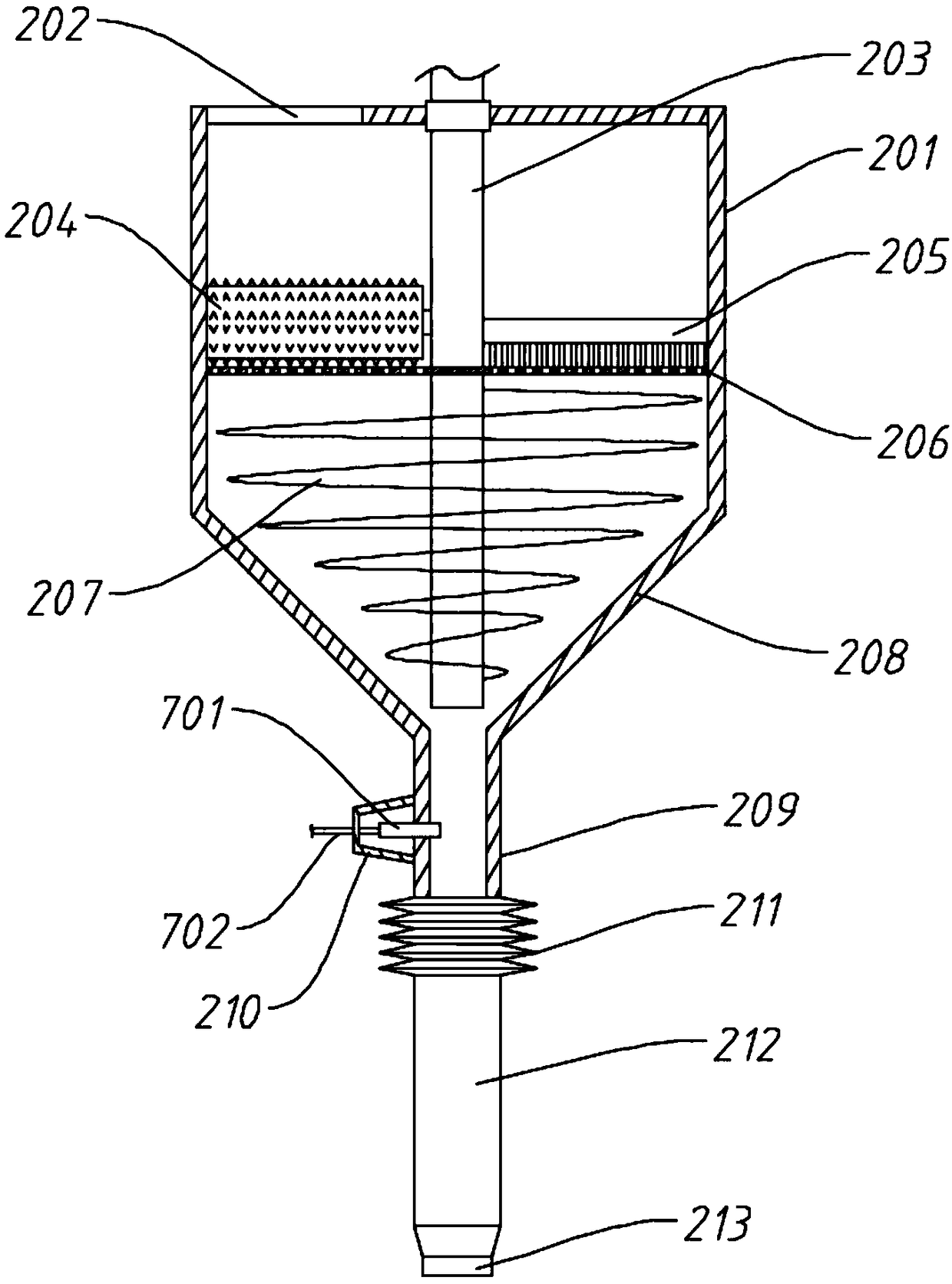
[0049] The shell 1 is fixed on the bottom plate 4, and the left side wall of the shell 1 is connected with a hook 101 through a rod; the buoy 6 is installed under the bottom plate 4; Feeding port 202, the bottom end of the barrel 2 extends into the shell 1, and the bottom plate 4 is provided with a through groove 401 corresponding to the discharge port at the bottom end of the barrel 2; the servo motor 801 is installed on the outer wall of the left side of the shell 1, and the servo motor 801 The output end protrudes to the right and is connected with the second rotating shaft 802 arranged horizontally;
[0050] The propulsion assembly 5 corresponds to the servo motor 801 and is arranged below the bottom plate 4, including a housing 501, a fourth rotating shaft 502 and a propeller blade 503; Protruding from the...
Embodiment 2
[0054] A self-propelled feeding robot for aquaculture, comprising a housing 1, a barrel 2, a bottom plate 4, a buoy 6, a servo motor 801 and a propulsion assembly 5;
[0055] The shell 1 is fixed on the bottom plate 4, and the left side wall of the shell 1 is connected with a hook 101 through a rod; the buoy 6 is installed under the bottom plate 4; Feeding port 202, the bottom end of the barrel 2 extends into the shell 1, and the bottom plate 4 is provided with a through groove 401 corresponding to the discharge port at the bottom end of the barrel 2; the servo motor 801 is installed on the outer wall of the left side of the shell 1, and the servo motor 801 The output end protrudes to the right and is connected with the second rotating shaft 802 arranged horizontally;
[0056] The propulsion assembly 5 corresponds to the servo motor 801 and is arranged below the bottom plate 4, including a housing 501, a fourth rotating shaft 502 and a propeller blade 503; Protruding from the...
Embodiment 3
[0061] A self-propelled feeding robot for aquaculture, comprising a housing 1, a barrel 2, a bottom plate 4, a buoy 6, a servo motor 801 and a propulsion assembly 5;
[0062] The shell 1 is fixed on the bottom plate 4, and the left side wall of the shell 1 is connected with a hook 101 through a rod; the buoy 6 is installed under the bottom plate 4; Feeding port 202, the bottom end of the barrel 2 extends into the shell 1, and the bottom plate 4 is provided with a through groove 401 corresponding to the discharge port at the bottom end of the barrel 2; the servo motor 801 is installed on the outer wall of the left side of the shell 1, and the servo motor 801 The output end protrudes to the right and is connected with the second rotating shaft 802 arranged horizontally;
[0063] The propulsion assembly 5 corresponds to the servo motor 801 and is arranged below the bottom plate 4, including a housing 501, a fourth rotating shaft 502 and a propeller blade 503; Protruding from the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More