

A positioning method of small unmanned aerial vehicle based on binocular vision
A technology of small drones and positioning methods, applied in image data processing, instruments, calculations, etc., can solve problems such as difficult positioning of drones, and achieve real-time processing, shorten processing time, and facilitate data query and management Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
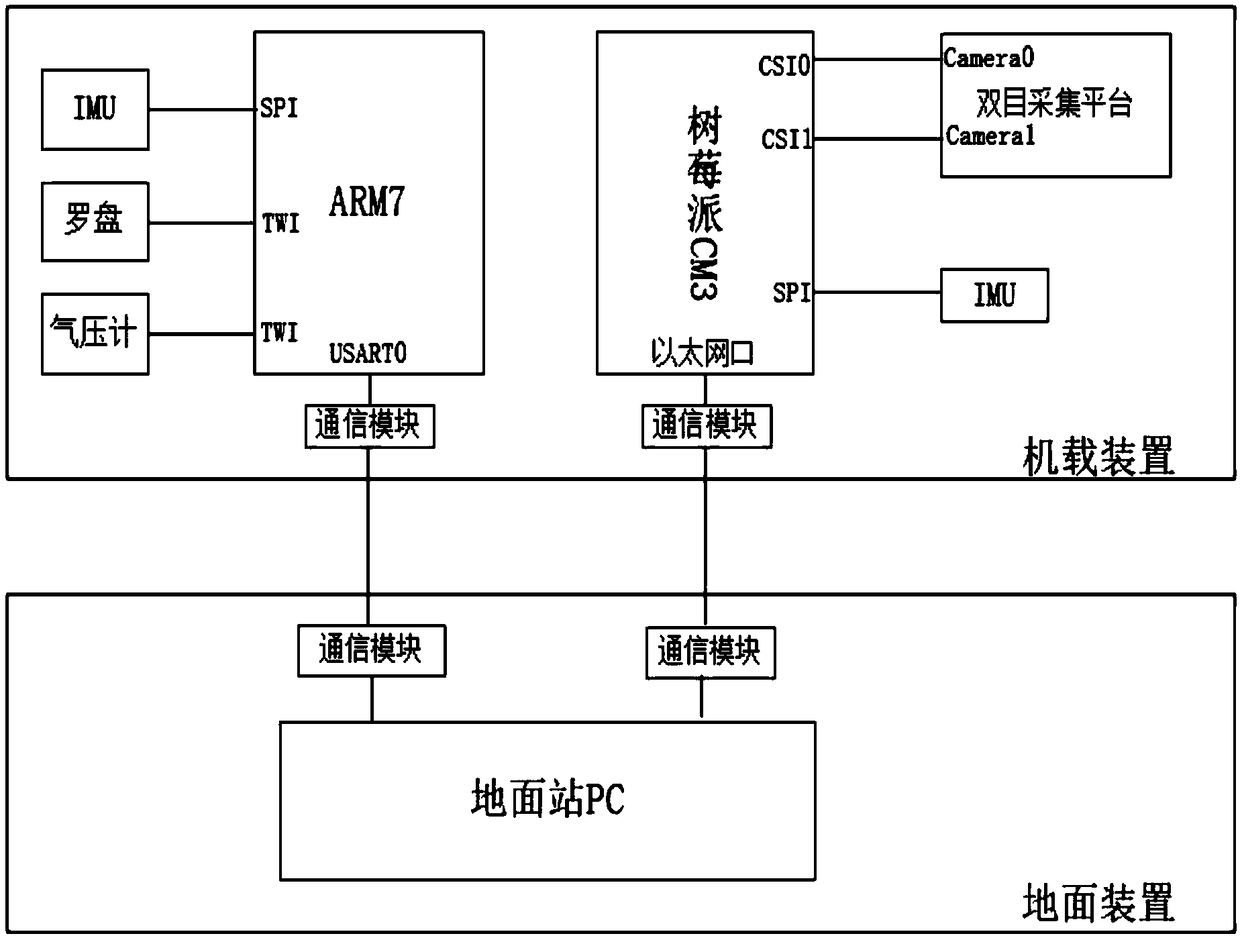
[0021] Such as figure 1 As shown, it is a block diagram of the hardware system structure of the small UAV positioning method based on binocular vision provided in this embodiment. The airborne system is based on the ARM7 as the main controller, and the normal working process of the aircraft is realized based on the ARM7. The image acquisition, processing and calculation platform is based on the Raspberry Pi CM3, on which the binocular acquisition platform connected by two CSI interfaces is used to acquire binocular images, and the inertial measurement unit is used to calculate the attitude angle and body of the aircraft at each moment The coordinates are relative to the rotation matrix of the initial position. The airborne system and the Raspberry Pi CM3 core board communicate with the ground station through socket programming. The ground station can receive the position of the aircraft in the navigation coordinate system at each time in real time.
[0022] This embodiment als...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More