

Intelligent ship path planning method based on fast search genetic algorithm
A genetic algorithm and path technology, applied in the field of intelligent ship path planning, can solve the problems of unfavorable ship navigation operation due to the distance between the inflection point and obstacles, unable to ensure the safety and stability of the ship to avoid obstacles, low path search efficiency, etc. Avoid the effect of poor local optimization ability and reducing steering angle
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment ( 1
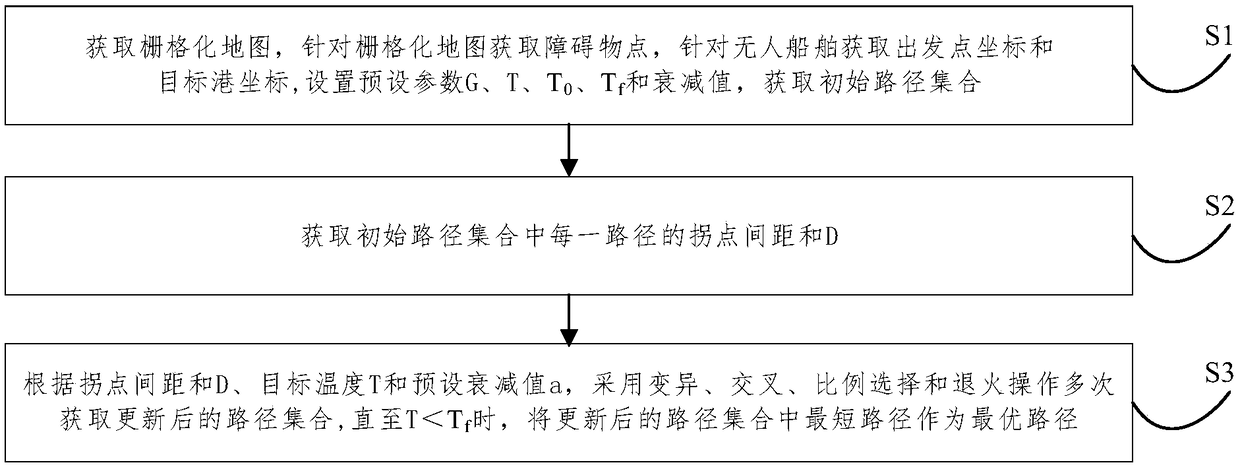
[0057] Such as figure 1 As shown, an intelligent ship path planning method based on fast search genetic algorithm includes the following steps:
[0058] S1. Rasterize the electronic chart of the test site, obtain the rasterized map, and obtain the obstacle information in the navigation area for the rasterized map. The unmanned ship obtains the coordinates of the current starting point of the unmanned ship through the sensor, and receives the shore-based command center. The issued dispatching command obtains the coordinates of the target port; the preset maximum number of iterations G and initial temperature T 0 , end temperature T f and the preset attenuation value a to obtain the initial path set pop of the unmanned ship 0 and the inflection point of each path in the set, the preset target temperature T is equal to the initial temperature T 0 ;
[0059] Among them, the initial path set pop 0 The number of paths in is equal to the preset value popsize; the preset attenuat...
Embodiment ( 2
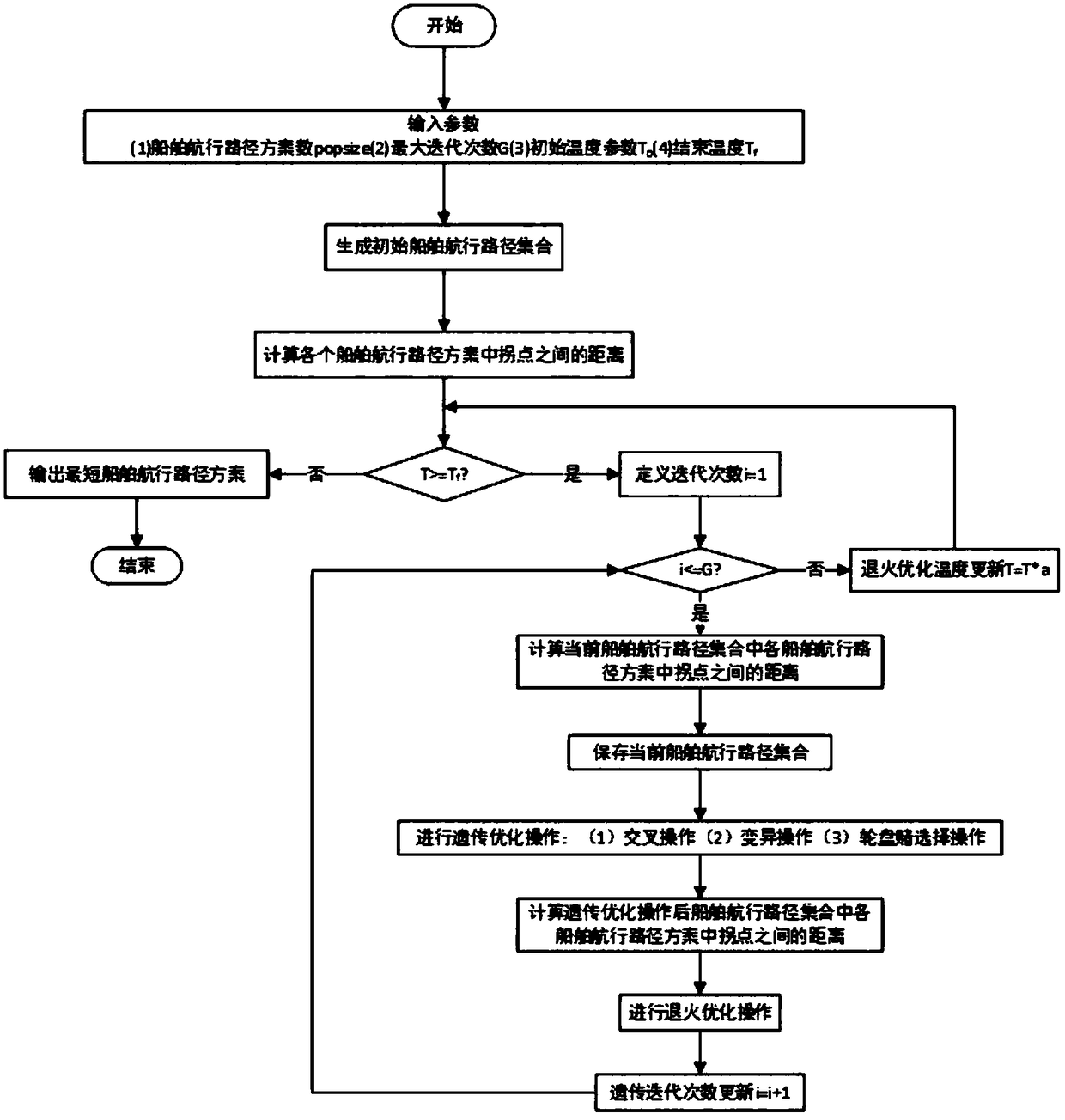
[0089] Such as figure 2 As shown, this embodiment adopts the inner and outer double loops, and adopts the idea of traditional genetic algorithm as the main part of the entire improved algorithm; the simulated annealing part adopts the Metropolis mechanism to accept and discard new solutions, and the specific scheme is as follows:
[0090] 101. Set the number of ship navigation path scheme popsize; set the maximum number of iterations G; set the initial target temperature T equal to the initial temperature T 0 ;Set the end temperature T f ;Generate the initial path set pop 0 ; Concretely, for example, the initial ship navigation path set generation method consists of the following steps:
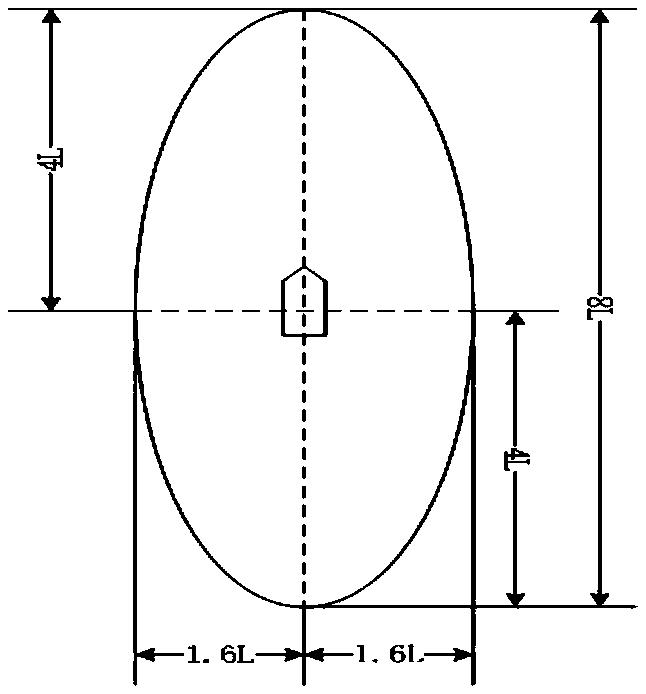
[0091] 101a. According to the hull length L of the ship, calculate the ship area under the current environmental situation. For example, in open waters, the ship area can be set as an ellipse whose major axis is 4 times the length of the ship and whose minor axis is 1.6 times the length ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More