

Iterative-feedback-setting-based tracking control method for pneumatic artificial muscle joint
A pneumatic artificial muscle, tracking control technology, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve the problems of difficult to accurately determine the controller parameters, hysteresis and creep, etc., to achieve high-precision tracking, The effect of strong applicability and fast convergence speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The specific embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
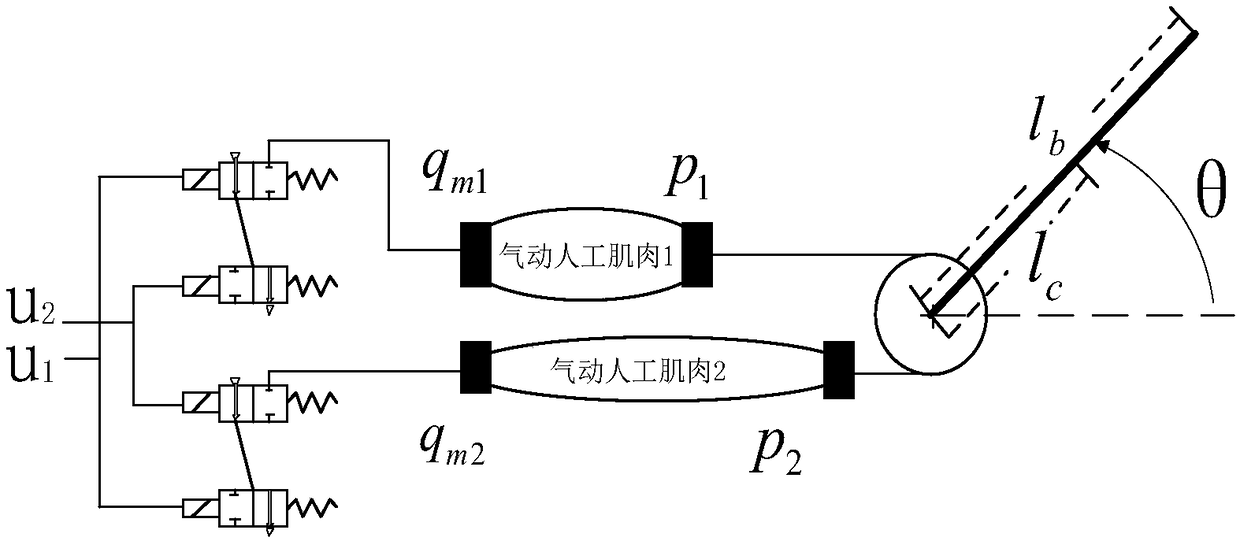
[0036] This application discloses a tracking control method based on iterative feedback tuning for pneumatic artificial muscle joints. For the physical model diagram of pneumatic artificial muscle joints in this application, please refer to figure 1 , the pneumatic artificial muscle joint includes a pair of antagonistic pneumatic artificial muscles (respectively named pneumatic artificial muscle 1 and pneumatic artificial muscle 2) and a timing pulley controlled by the pair of antagonistic pneumatic artificial muscles, the timing pulley connects and drives the joint rod , assuming that the length of the joint rod is l b , the length from the center of mass of the joint rod to the rotation axis is l c , the mass of the articulated rod is m. A load is applied to the end of the articulated rod, figure 1 The load, which has a mass M, is not s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More