Saddle type underwater robot
An underwater robot and robot technology, which is applied to underwater operation equipment, transportation and packaging, ships, etc., can solve the problems such as the authenticity of the collected signals that affect the submarine instruments, the unsatisfactory detection position, and the consumption of signal strength, so as to save marine life. The effect of operating expenses, expanding operating functions, and shortening operating time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0028] The scope of the present invention is not limited to this embodiment.
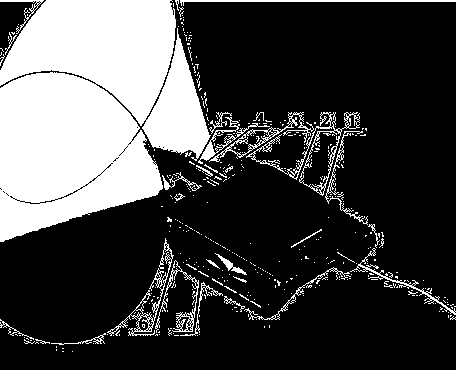
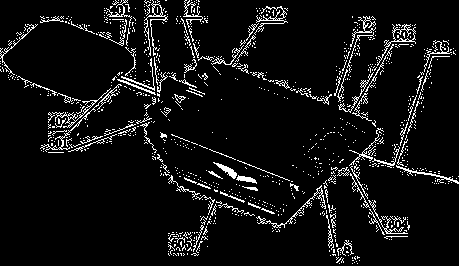
[0029] The piggyback underwater robot consists of a robot back platform 1, an underwater tool 2, an upper arm 3, a forearm 4, a joint 5, a robot body 6, two crawler walking systems 7, 4 vertical propellers 8, and 4 horizontal Propeller 9, left camera and lighting device 10, right camera and lighting device 11, upper camera and lighting device 12, rear camera and lighting device 14, and trailing cable 13 are formed.
[0030] A protrusion 602 is arranged in the middle of the front side of the robot body 6, on which the upper arm 3 is fixed, the upper arm 3 is equipped with a joint 5, and the joint 5 is connected to the front arm 4. Wherein, the forearm 4 is provided with a connecting palm 401 and a connecting bolt 402 , and the underwater tool 2 is connected and installed through the connecting palm 401 and the connecting bolt 402 .
[0031] The front of the robot body 6 is provided with two flanges ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More