

Control method and system for long-distance and fixed-area sail unmanned ship
A control method and technology of unmanned ships, applied in control/regulation systems, two-dimensional position/channel control, non-electric variable control, etc. Operation and other problems, to improve continuous working ability and data transmission ability, to expand the maximum offshore distance and monitoring range, and to achieve rich and intuitive monitoring information
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be further described below in conjunction with specific examples and drawings.
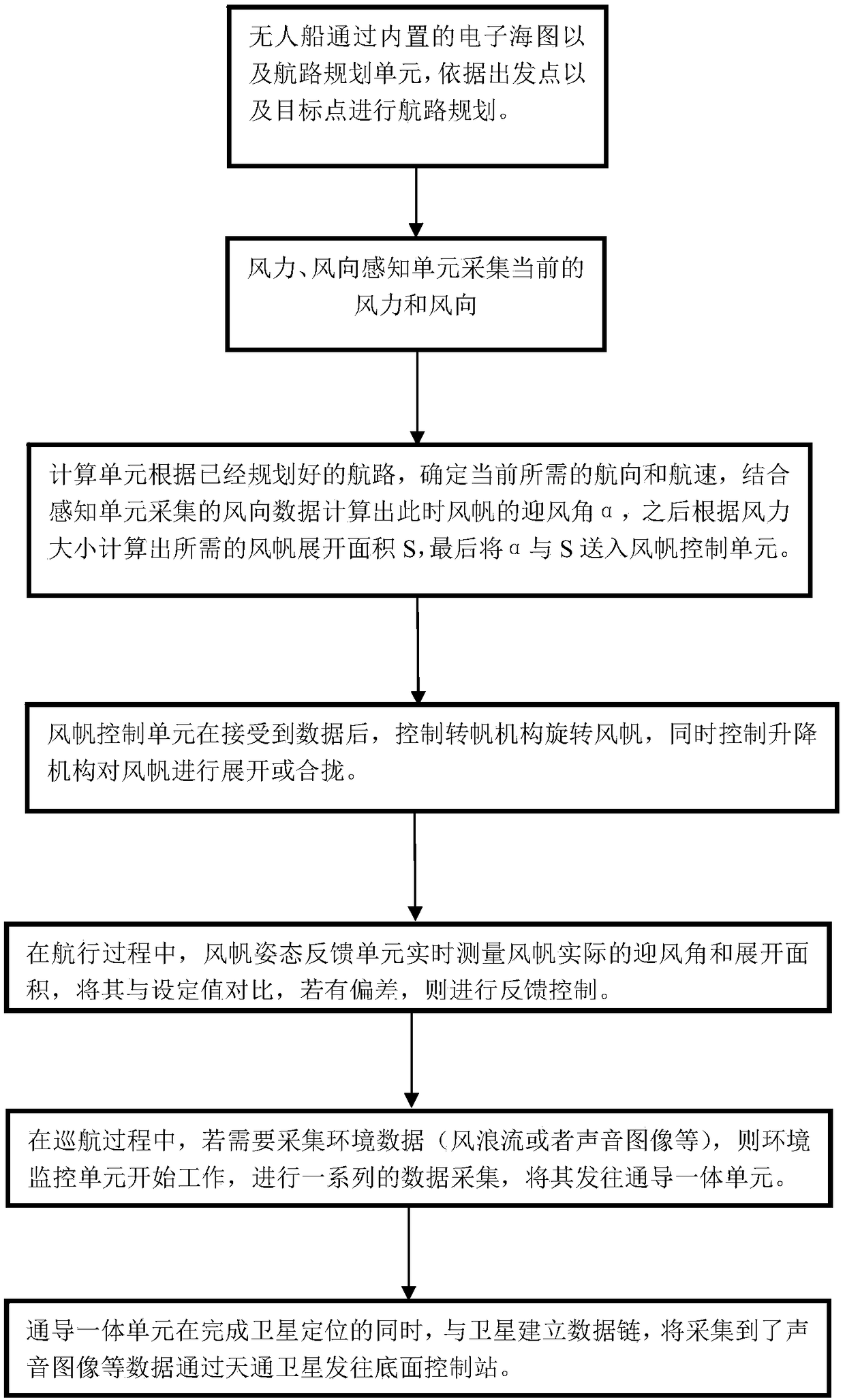
[0029] The present invention provides a method for controlling a remote unmanned sailing vessel in a fixed area, such as figure 1 As shown, it includes the following steps:
[0030] S1. Route planning through electronic chart and route planning unit. Specifically, Beidou navigation is used to obtain the navigation point of the unmanned ship on the electronic chart, and then the binary tree route planning algorithm and the A-star route optimization algorithm are used for route planning.
[0031] S2. Collect the current wind and wind direction in real time, specifically use the wind direction sensing unit to detect the current wind direction, and the wind sensing unit monitors the current wind pressure P in the wind direction.
[0032] S3. Determine the current required course and speed according to the planned route, calculate the set windward angle of the sail at this tim...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More