

Method and device for generating vehicle simulation trajectory, computer device and storage medium
A trajectory and simulation technology, applied in the field of trajectory simulation, can solve the problems that traffic vehicles cannot reflect the characteristics of human driving and do not meet the constraints of vehicle dynamics.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
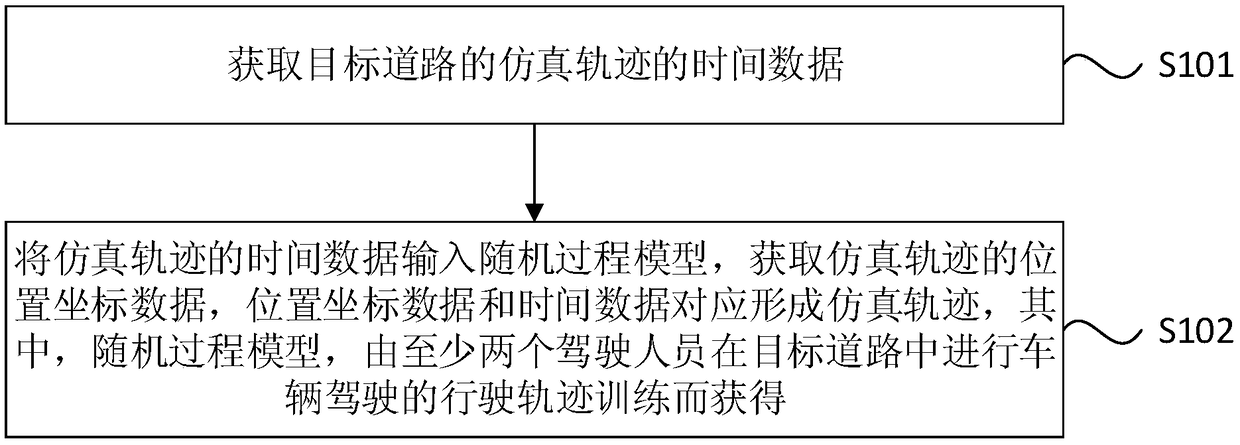
[0027] figure 1 It is a flow chart of a method for generating a vehicle simulation trajectory provided by Embodiment 1 of the present invention. The method of this embodiment can be executed by a device for generating a vehicle simulation trajectory, which can be implemented by means of hardware and / or software, and Generally can be integrated in computer equipment. The method of this embodiment specifically includes:
[0028] S101. Acquire time data of a simulated trajectory of a target road.
[0029] It is known that when unmanned vehicles are tested in the automatic driving simulation scene, multiple unmanned vehicles will be set as traffic vehicles on the test road, and each traffic vehicle will drive according to the driving trajectory input in advance. Since the function of the traffic car is to provide a real driving environment for the unmanned vehicle under test, if the driving trajectory of the traffic car is closer to that of a human being, then the road test of t...
Embodiment 2
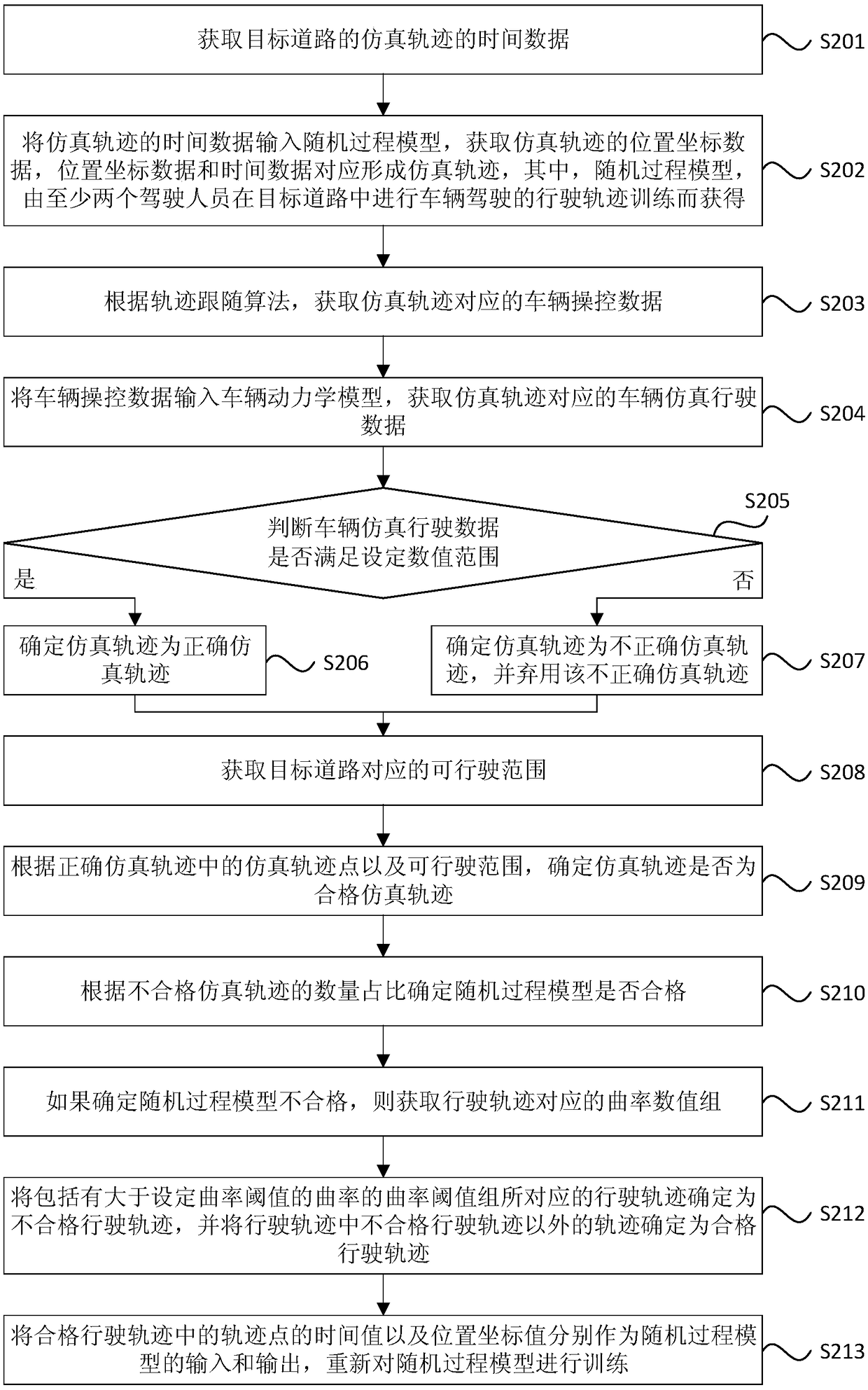
[0048] figure 2 It is a flow chart of a method for generating a vehicle simulation trajectory provided by Embodiment 2 of the present invention. This embodiment is optimized on the basis of the above embodiments. In this embodiment, a specific implementation manner of adding a process of checking the simulation trajectory and adding a step of retraining the stochastic process model is given.
[0049] Correspondingly, the method in this embodiment specifically includes:
[0050] S201. Acquire time data of a simulated trajectory of a target road.
[0051] S202. Input the time data of the simulation trajectory into the random process model, obtain the position coordinate data of the simulation trajectory, and the position coordinate data and the time data correspond to form a simulation trajectory, wherein, in the random process model, at least two drivers drive the vehicle on the target road Acquired by driving trajectory training.
[0052] S203. Acquire vehicle control data...
Embodiment 3
[0075] image 3 It is a structural diagram of a device for generating a vehicle simulation trajectory provided by Embodiment 3 of the present invention. Such as image 3 As shown, the device includes: a time data acquisition module 301 and a simulation trajectory generation module 302, wherein:
[0076] Time data acquisition module 301, used to obtain the time data of the simulated trajectory of the target road;
[0077] The simulation trajectory generation module 302 is used to input the time data of the simulation trajectory into the random process model, obtain the position coordinate data of the simulation trajectory, and the position coordinate data and the time data correspond to form the simulation trajectory;
[0078] Wherein, the stochastic process model is obtained by at least two drivers performing vehicle driving trajectory training on the target road.
[0079] The embodiment of the present invention provides a device for generating a simulated trajectory of a v...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More