

Four-rotor autonomous navigation method based on visual inertial navigation fusion
An autonomous navigation, quadrotor technology, applied in the quadrotor field, can solve the complex dynamics of the flight system, unable to meet the needs of rapid navigation of UAVs and other problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
[0084] For the convenience of description, the relevant technical terms appearing in the specific implementation are explained first:
[0085] GFTT: An Improved Harris Corner Extraction Method;
[0086] KLT: an optical flow method for feature tracking;
[0087] SFM: a vision-based approach to motion recovery;
[0088] Odometry: estimate camera motion between adjacent images;
[0089] Point cloud: a map represented by a set of discrete points;
[0090] TSDF: Truncated signed distance function, TSDF construction represents a surface mapping method;
[0091] Octree map: a form of map for navigation;
[0092] MarchingCubes: A Mapping Visualization Algorithm.
[0093] Rviz: 3D visualization and debugging tool provided by ROS robot system;
[0094] Mavros: Complete the communication mechanism between flight control module messages and ROS messages;
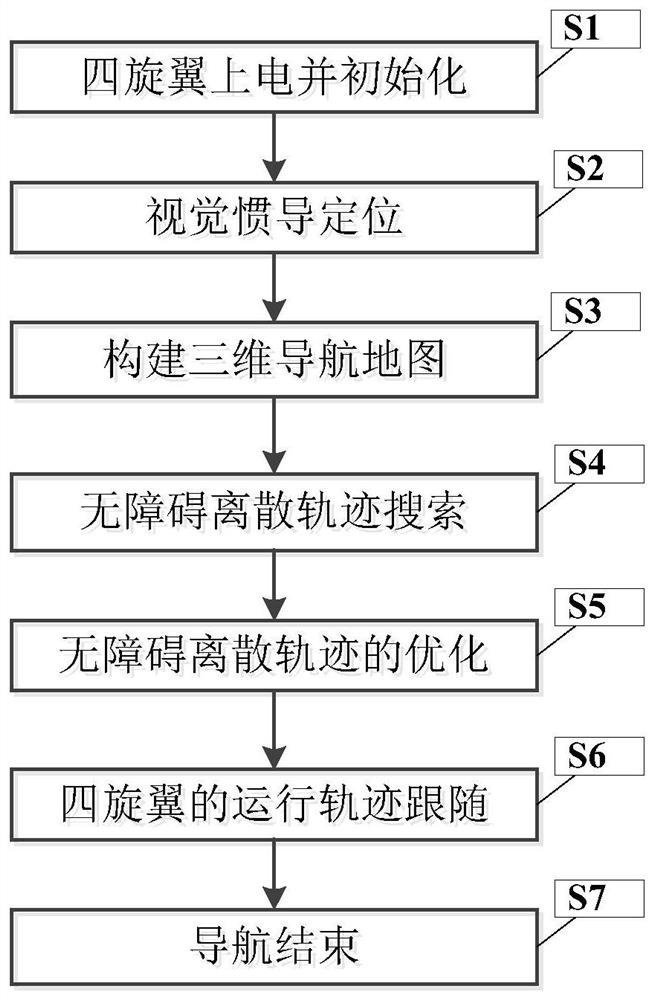
[0095] figure 1 It is a flow chart of a four-rotor autonomous navigation method based on visual inertial navigation fusion in ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More