

Rigid-soft coupling mechanical finger with variable-rigidity internal skeleton
A technology of mechanical fingers and endoskeleton, which is applied in the field of industrial automation robots, can solve the problems of unreachable strength, limited grasping capacity and carrying capacity, etc., and achieve the effect of beautiful structure, improved grasping capacity and obvious performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
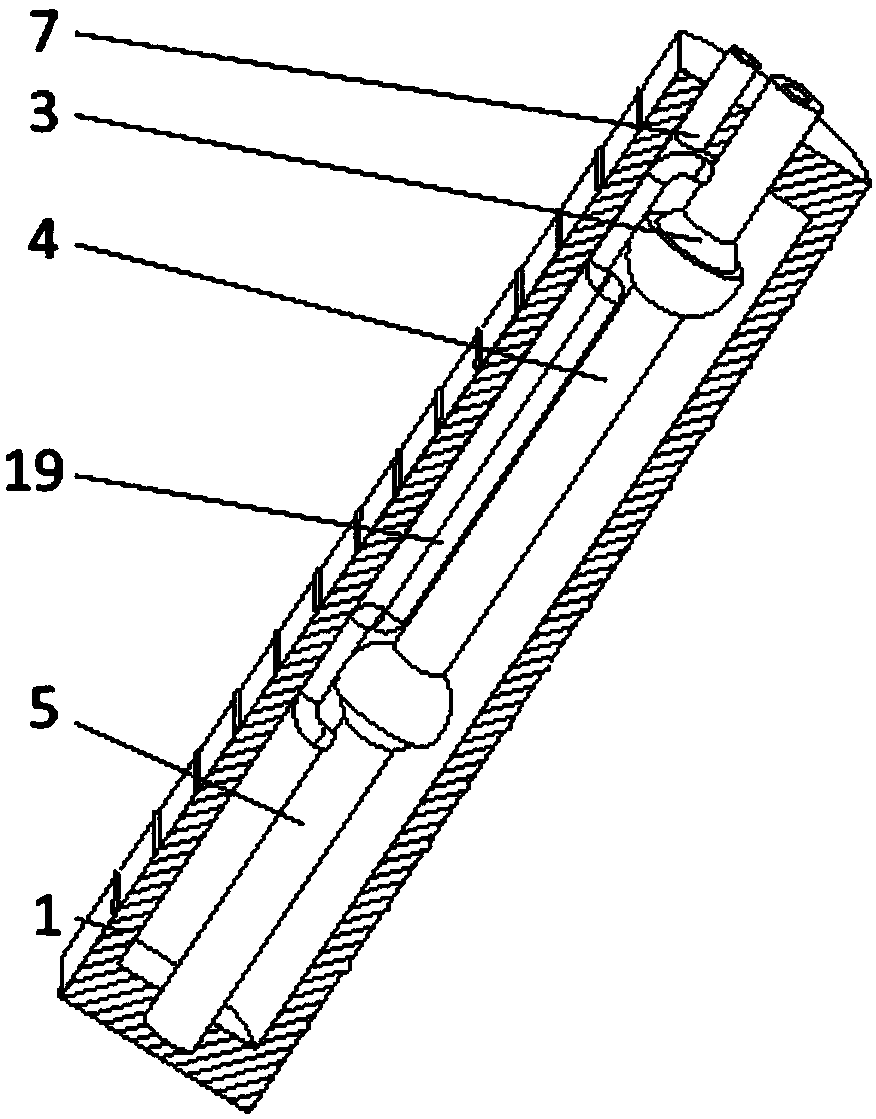
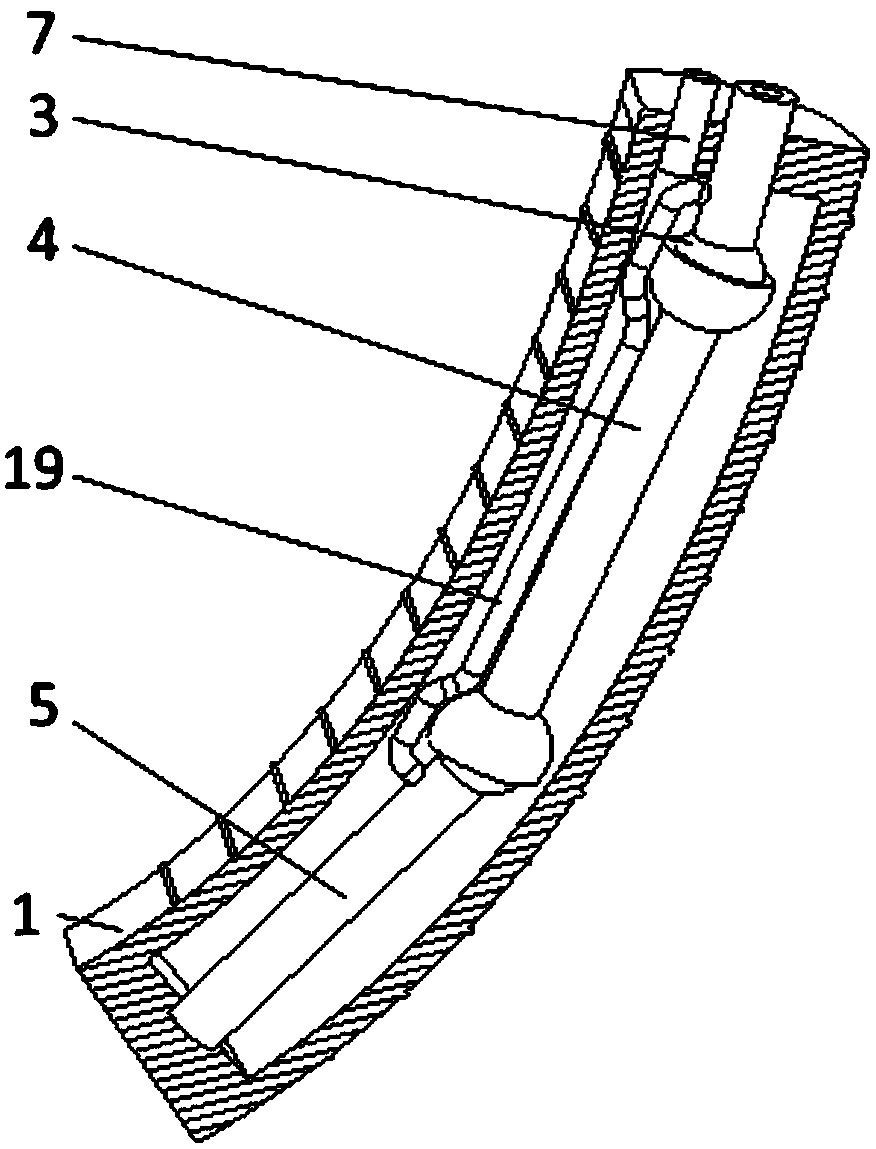
[0022] like figure 1 As shown, it is a rigid-soft coupled mechanical finger with a variable stiffness endoskeleton involved in this embodiment, which includes: a soft body finger 1 and a variable stiffness endoskeleton 2 arranged in the soft body finger 1, wherein: one end of the variable stiffness endoskeleton 2 is set Outside the finger 1 of the software.
[0023] The variable stiffness endoskeleton 2 includes: the proximal phalanx 3, the middle phalanx 4 and the distal phalanx 5 connected in sequence, wherein: the middle phalanx 4 is rotationally connected with the proximal phalanx 3 and the distal phalanx 5 respectively, and the proximal phalanx One end of the phalanx 3 is set outside the soft finger 1 , and one end of the distal phalanx 5 is set in the soft finger 1 .
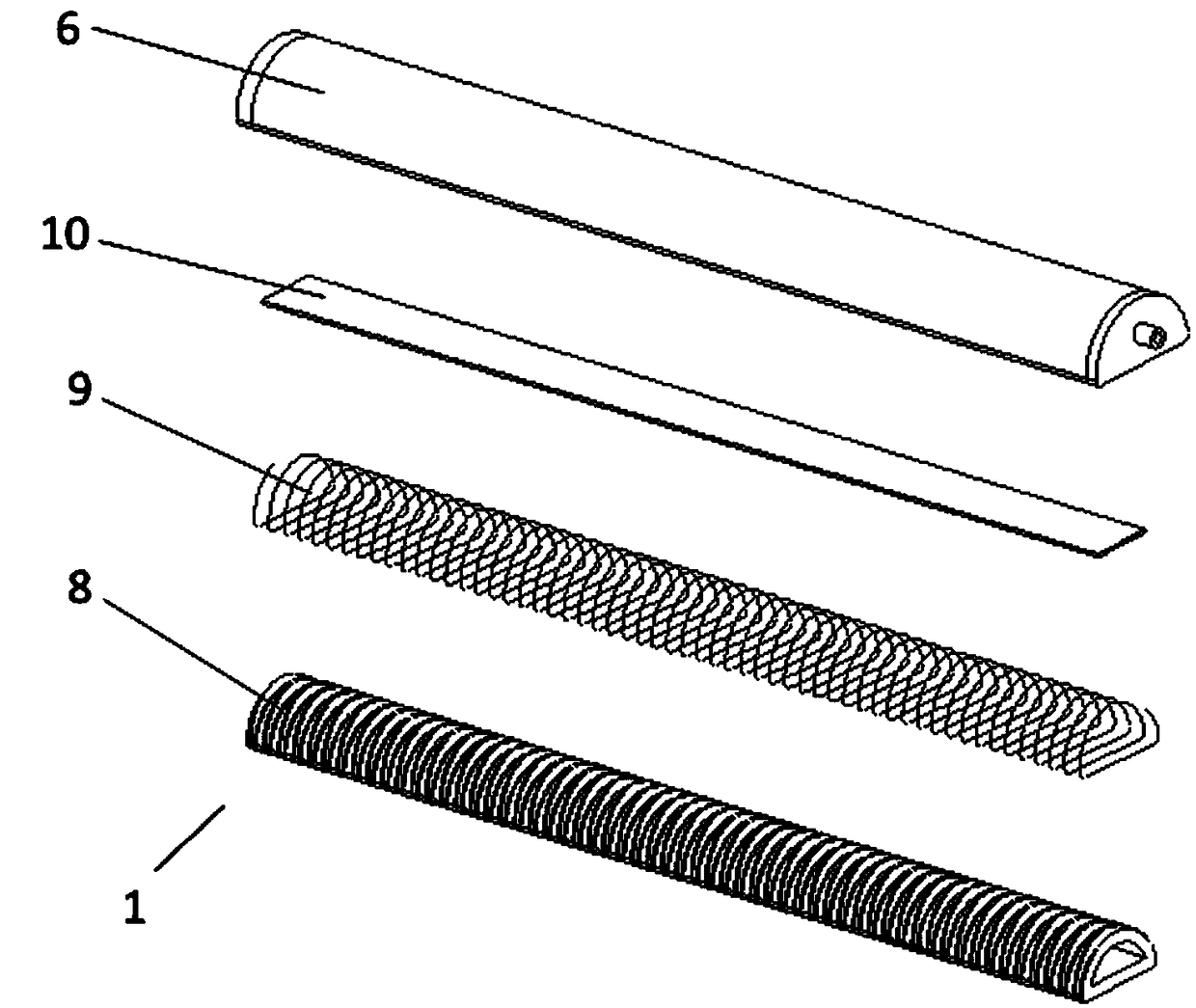
[0024] The soft finger 1 includes: a finger outer layer 6 , an air nozzle 7 and a finger inner core 8 , wherein: the finger inner core 8 is arranged in the finger outer layer 6 , and the air nozzle 7 is a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More