

RBF-ARX (Radial Basis Function-Autoregressive exogenous) model based quick robust predictive control method
A technology of RBF-ARX and predictive control, which is applied in the field of rapid robust predictive control of fast systems, and can solve problems such as difficulty in obtaining accurate mathematical models, difficulty in application, unsolved control system convergence, robust closed-loop system stability, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
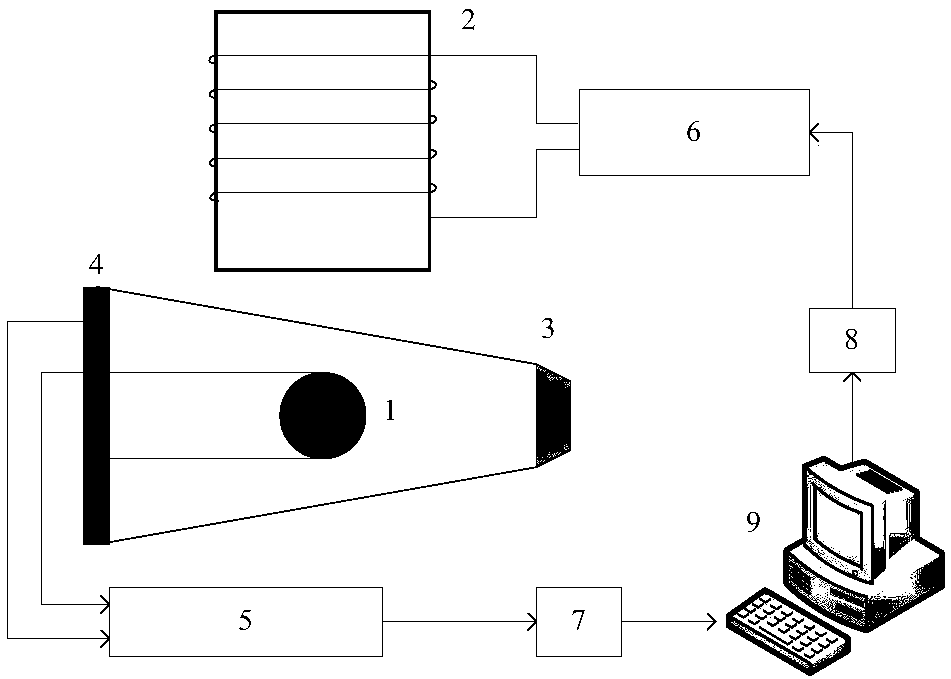
[0052] Such as figure 1 Shown. The magnetic levitation ball system can only control the free movement of the steel ball up and down. The PC 9 outputs the control voltage through the designed controller, and transmits it to the electromagnetic winding drive circuit 7 through the D / A converter 8. The electromagnetic winding 2 generates electromagnetic induction when the corresponding current is passed, and an electromagnetic field is formed under the winding to make it in The steel ball 1 in the electromagnetic field moves up / down under the action of the electromagnetic induction force F. By adjusting the air gap g between the electromagnet and the steel ball (ie the position of the steel ball), the electromagnetic force F and the gravity G of the steel ball are balanced; At the same time, the photoelectric sensor composed of the LED light source 3 and the photoelectric board 4 is used to detect the position of the steel ball, and the corresponding voltage signal is transmitted ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More