

Drive-by-wire differential steering system for wheel type independent drive vehicle and control method thereof
An independent drive and steering system technology, applied in the field of automobile steering system and its control, can solve the problems of difficult integration layout, high cost, and difficulty in ensuring reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
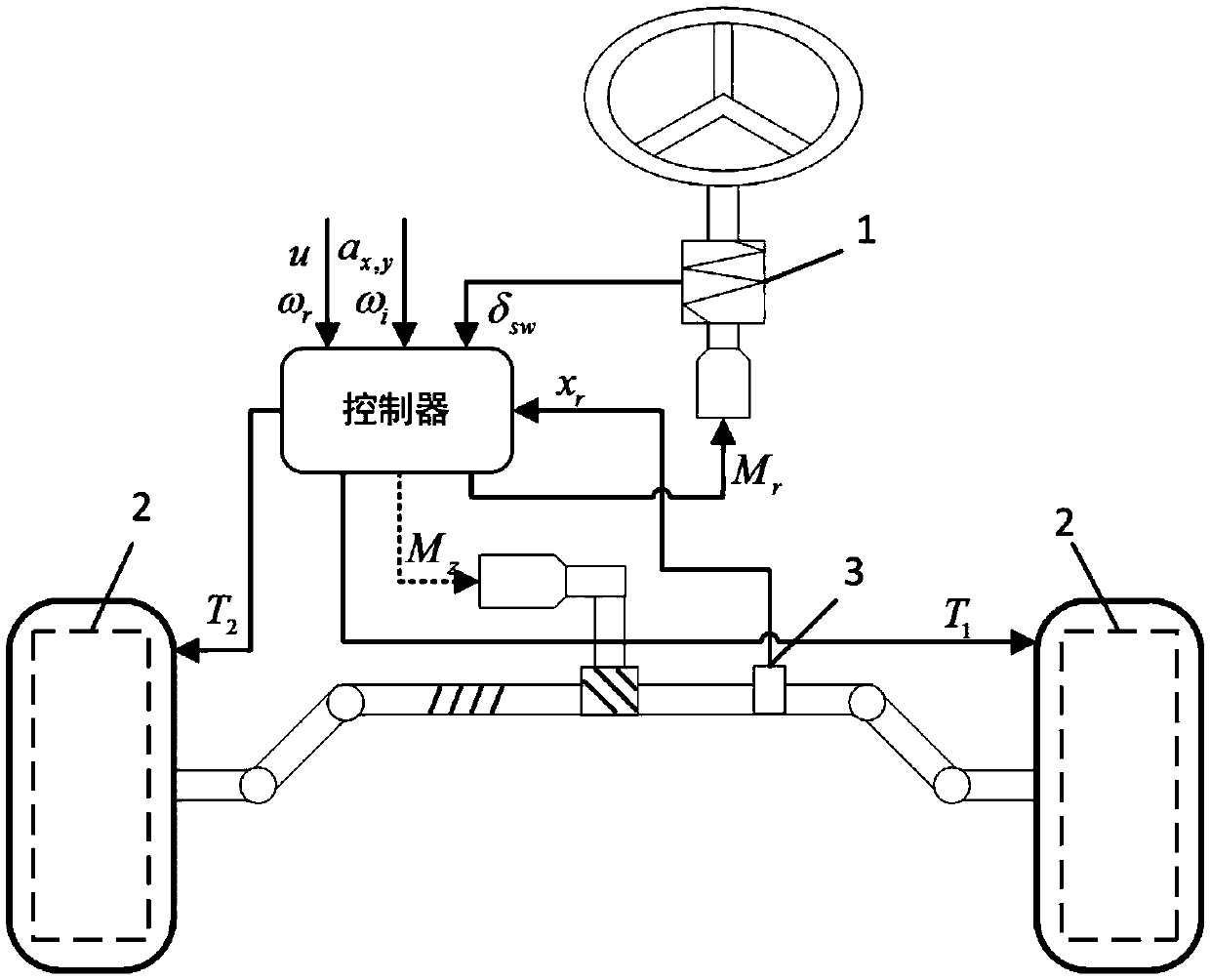
[0066] Such as figure 1 As shown, a control-by-wire differential steering system for a wheeled independent drive vehicle, including:
[0067] The information detection module is used to detect various state information of the vehicle;
[0068] The controller is used to judge the steering mode according to the detected vehicle state information, including the steer-by-wire mode and the differential steer-by-wire mode, determine the target torque required by each motor, and send the corresponding motor control signal;
[0069] The steering execution module is used to make a corresponding torque response according to the motor control signal to drive the steering mechanism to realize the differential steering of the electric vehicle.
[0070] The information detection module includes:
[0071] Steering wheel angle / moment sensor, connected to the steering column of the steering wheel, is used to detect the steering wheel angle turned by the driver and the input torque when turn...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More